第二代序列模型-Transformer¶
Transformer 研究动因¶
-
背景:在 2017 年之前,NLP 任务(如机器翻译)以及 Seq2Seq 架构大多由 RNN / LSTM 统治。
- Sequence to Sequence (Seq2Seq) 模型通常由一个 RNN 编码器和一个 RNN 解码器组成,编码器将输入序列压缩成一个固定长度的上下文向量,解码器根据这个向量生成输出序列。
- Sequence to Sequence (Seq2Seq) 模型通常由一个 RNN 编码器和一个 RNN 解码器组成,编码器将输入序列压缩成一个固定长度的上下文向量,解码器根据这个向量生成输出序列。
-
颠覆性创新:2017 年 Google 发表了著名的论文 "Attention is All you need"1,提出了一种完全摒弃 RNN 和 CNN 结构、直接基于自注意力机制 (Self-Attention) 的网络架构——Transformer,并在当时的机器翻译任务上取得了 SOTA (State of the Art)。
-
统一的底座:Transformer 最初设计用于处理序列数据,但如今它已经跨越了模态,成为了大量先进视觉模型 (Vision)、自然语言处理 (NLP) 和 大语言模型 (LLM) 的通用底层基石。
Transformer 模型设计23¶
整体架构演变¶
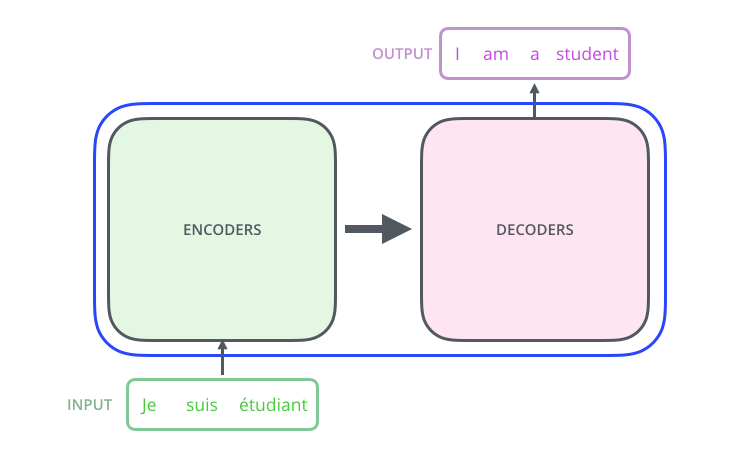
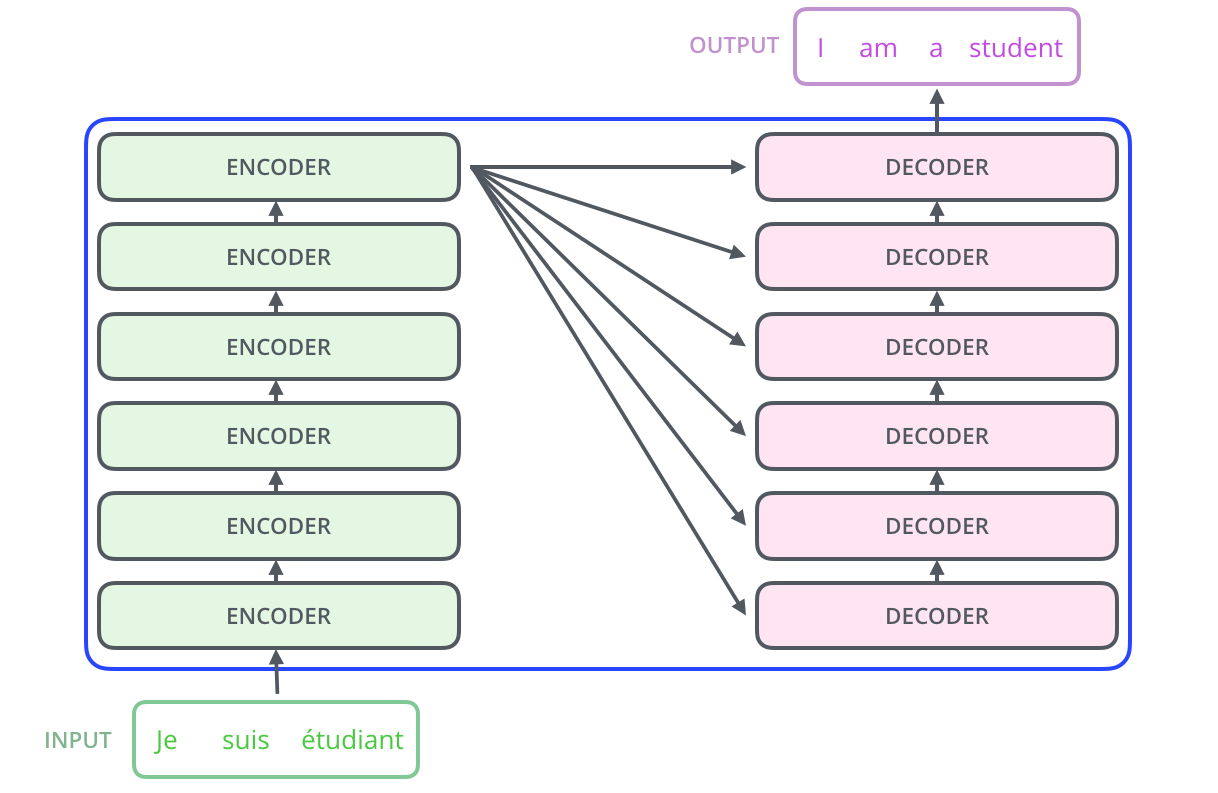
Transformer 本质上是一个 Sequence to Sequence 模型,包含编码器和解码器。根据任务的不同,其架构演变出了三大主流分支:
-
原始 Transformer (Encoder-Decoder):用于机器翻译等 Seq2Seq 任务。
-
BERT (Encoder only):提取上下文双向特征,常用于文本理解、分类、实体识别任务。
-
GPT (Decoder only):单向自回归生成,是现代大语言模型(如 ChatGPT, LLaMA 等)的通用架构。
核心模块¶
自注意力机制 (Self-Attention)¶
-
核心思想:类似于人类的注意力,在处理当前词时,模型会同时看上下文中其他的词,并为相关的词分配更高的注意力权重。
-
计算步骤:
-
编码器的每个输入向量(一般为词嵌入向量 Embedding)分别乘以三个在训练过程中学习到的权重矩阵 \(W^Q, W^K, W^V\),得到:查询向量 \(q\) (Query), 键向量 \(k\) (Key), 值向量 \(v\) (Value)。
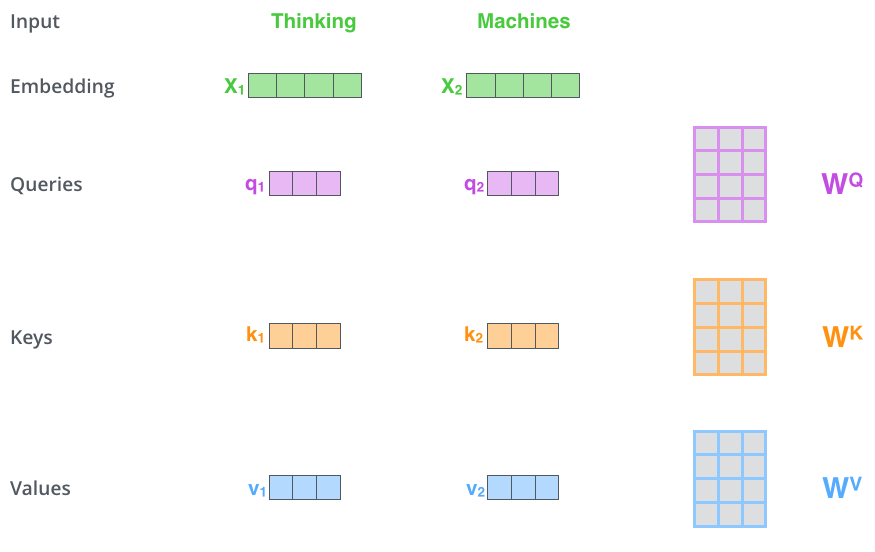
- 注:这些新向量的维度通常比原始的嵌入向量小,记为 \(d_k\)。
-
对于当前单词,对输入序列中的每一个单词(包括它自己)打分:计算当前单词的查询向量 \(q_i\) 与每个单词的键向量 \(k_i\) 的点积作为对应单词的得分:\(q_i \cdot k_j^\top\)。
- 这个得分决定了我们在编码当前位置的单词时,需要将多少“注意力”分配给序列中的其他单词。
-
缩放点积得分:\(\frac{q_i k_j^T}{\sqrt{d_k}}\)。
- 除以 \(\sqrt{d_k}\) 可以使得在训练期间梯度更加稳定,避免点积结果过大导致后续的 Softmax 函数进入梯度极小的饱和区。
-
进行 Softmax 归一化:\(\text{Softmax}\left(\frac{q_i k_j^T}{\sqrt{d_k}}\right)\)。
-
这个 Softmax 分数决定了在当前位置的表达中,各个单词应该占据多大的比重。
-
显然,当前单词本身的得分通常是最高的,但有时模型也会关注到与当前单词相关的其他词。
-
-
将每个单词的值向量 \(v_i\) 乘以各自对应的 Softmax 分数:\(\text{Softmax}\left(\frac{q_i k_j^T}{\sqrt{d_k}}\right) v_i\)。
- 保留我们想要关注的单词的值(因为对应的值乘以了较大的分数),并淹没或削弱那些不相关的单词(因为对应的值乘以了较小的分数)。
-
对加权后的值向量求和,结果就是自注意力层在该位置(即针对第 \(i\) 个单词)的最终输出向量 \(z_i\):
\[ z_i = \sum_{j=1}^{n} \text{Softmax}\left(\frac{q_i k_j^T}{\sqrt{d_k}}\right) v_j \]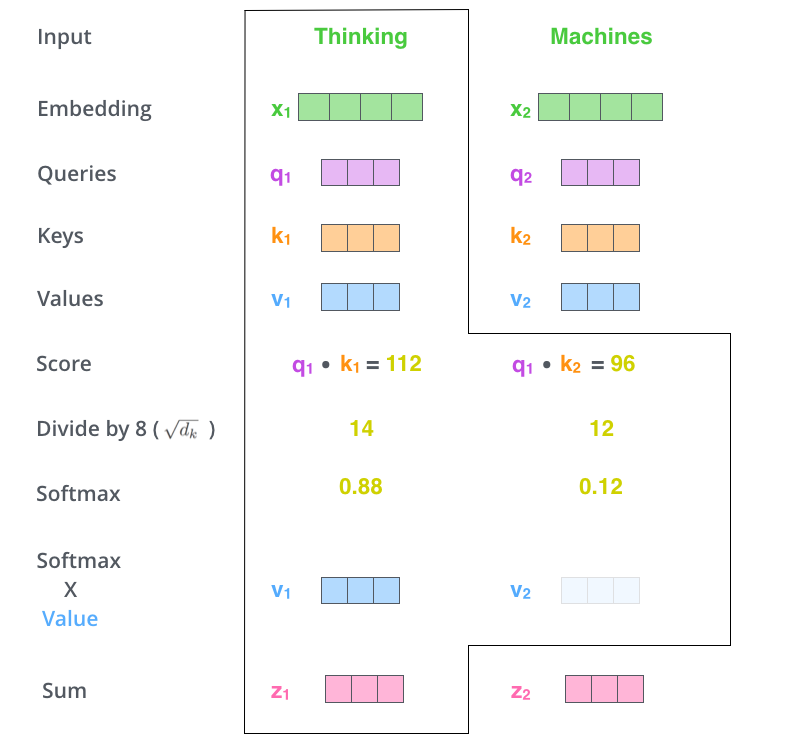
-
-
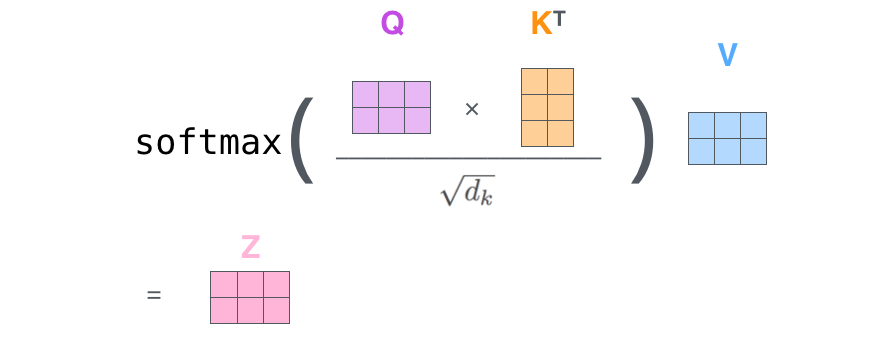
矩阵化运算:将上述步骤合并打包成矩阵运算,把所有的查询、键、值向量分别打包进矩阵 \(Q\)、\(K\) 和 \(V\) 中,则整个自注意力过程可以表示为:
\[ Z = \text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V \]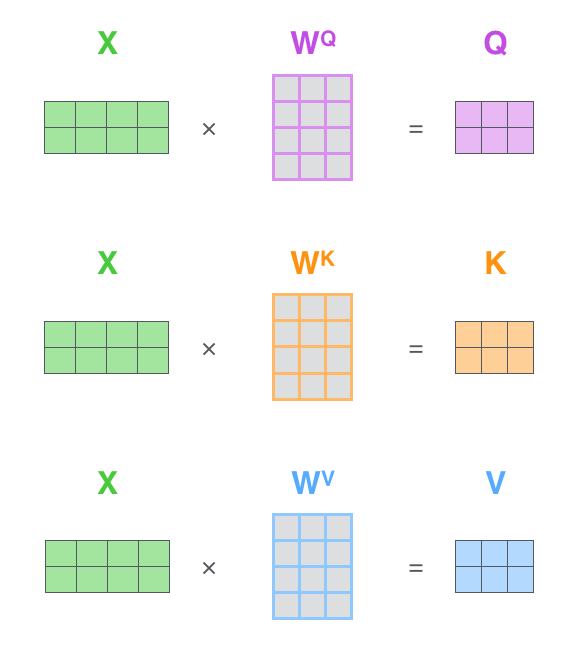
多头注意力机制 (Multi-Head Attention)¶
-
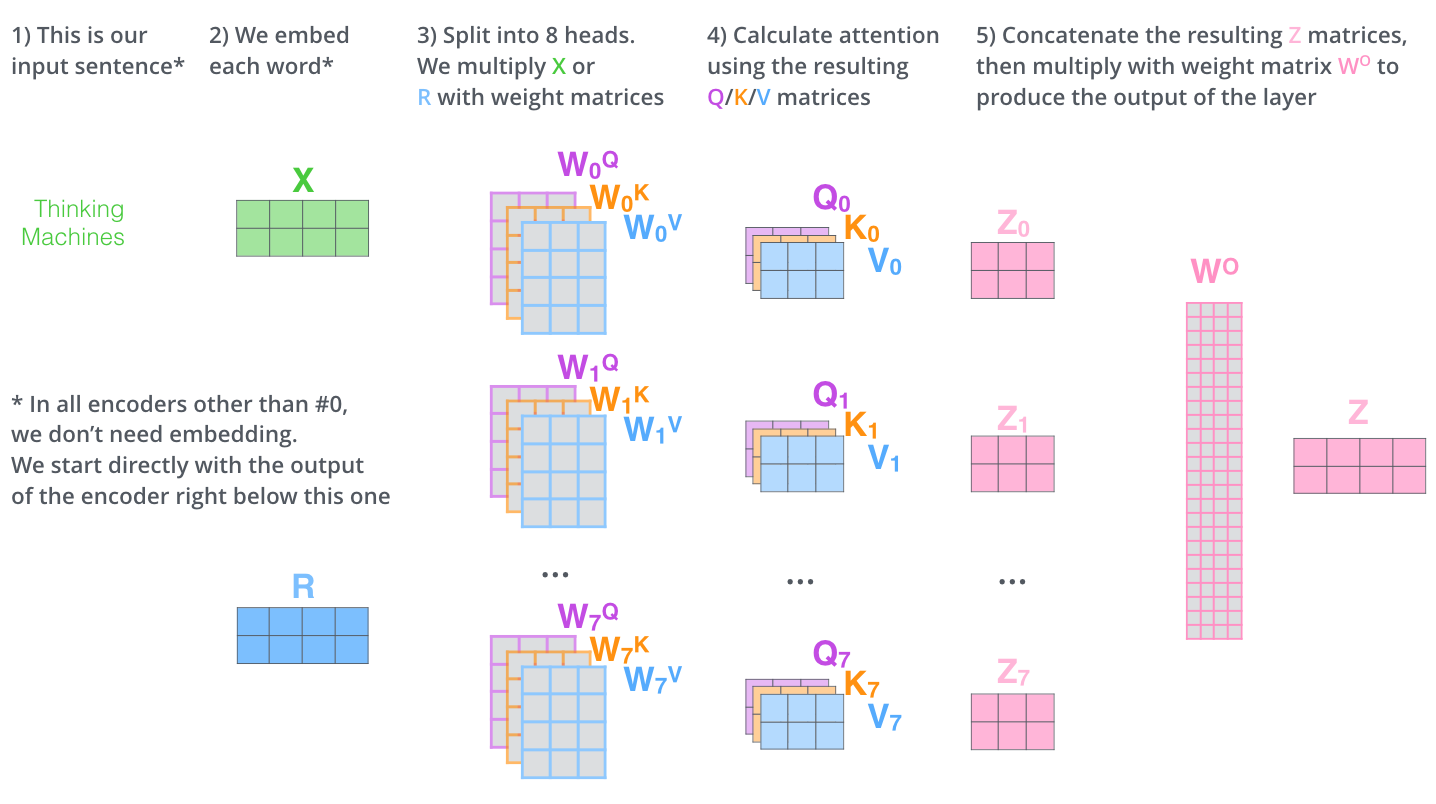
概念:每一步不止使用一组注意力机制,而是将 \(Q, K, V\) 拆分投射到多个低维的子空间中,分别进行 Attention 计算,最后将结果拼接 (Concat) 起来。
-
意义:允许模型在不同的表示子空间里“同时关注多个点”。例如,有的“头(Head)”关注语法结构,有的关注指代关系,有的关注情感极性。
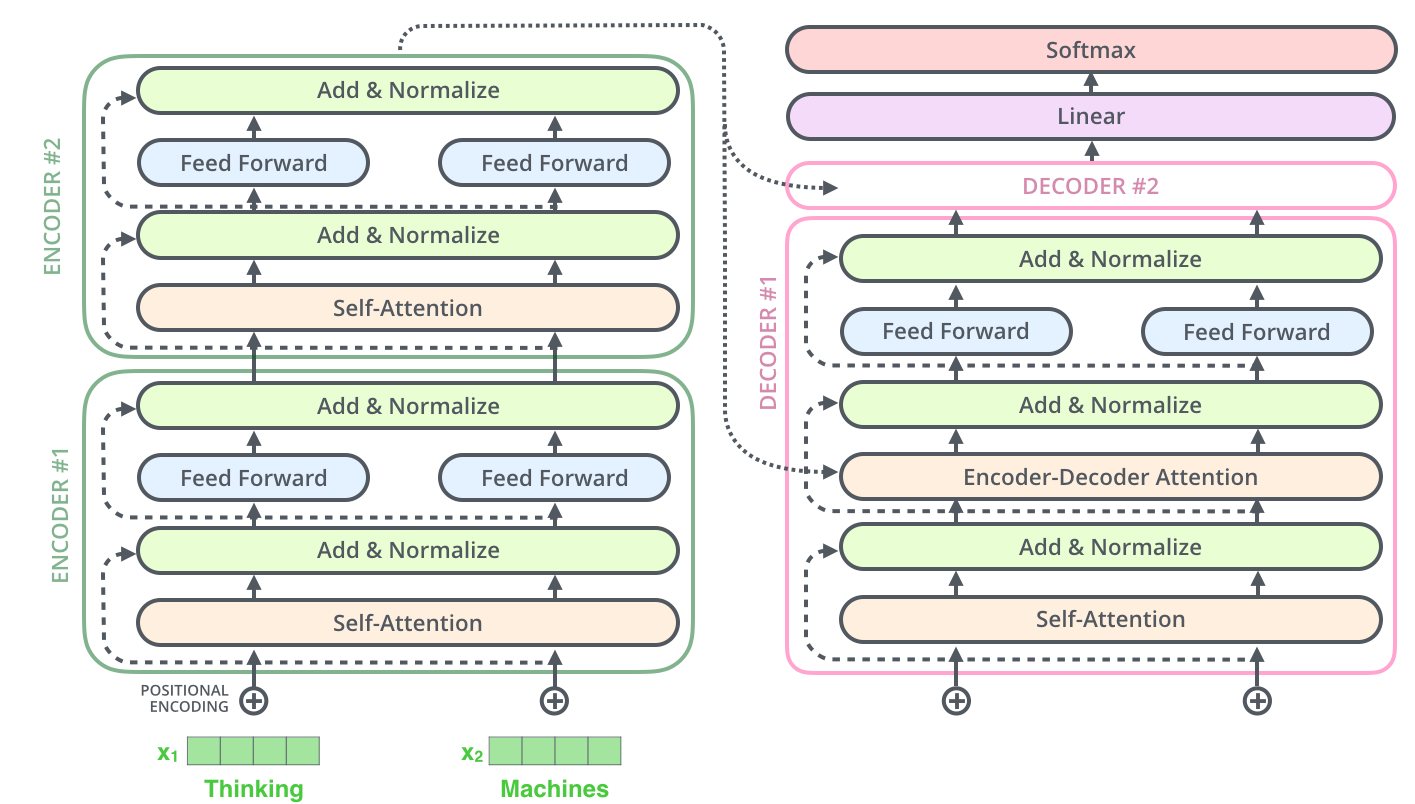
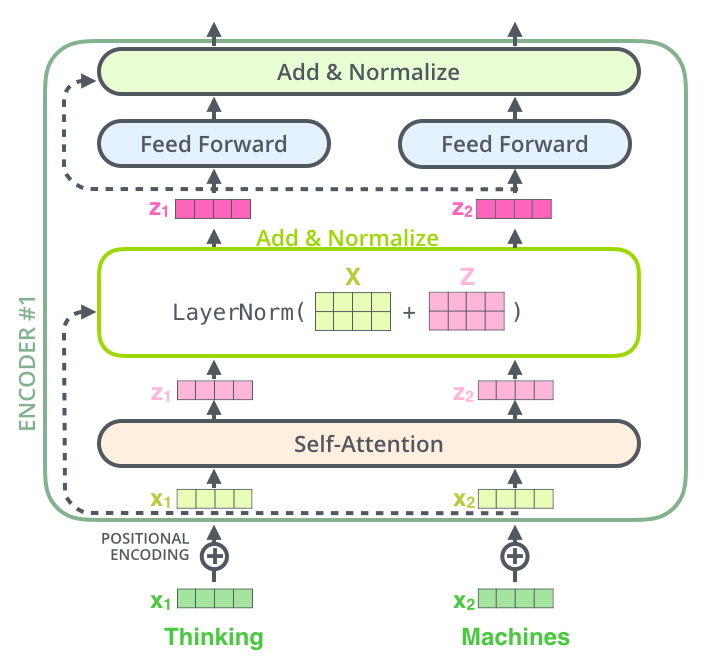
残差连接与层归一化 (Add & Normalize)¶
在每个自注意力层(Self-Attention)和前馈神经网络层(FNN)之后,都跟着一个 Add & Normalize 模块。
-
残差连接 (Residue Connection / Add):
-
形式:\(x_{out} = x_{in} + \text{Layer}(x_{in})\)。
-
作用:保持正向/反向的信息流动,防止深层网络发生梯度消失。
-
-
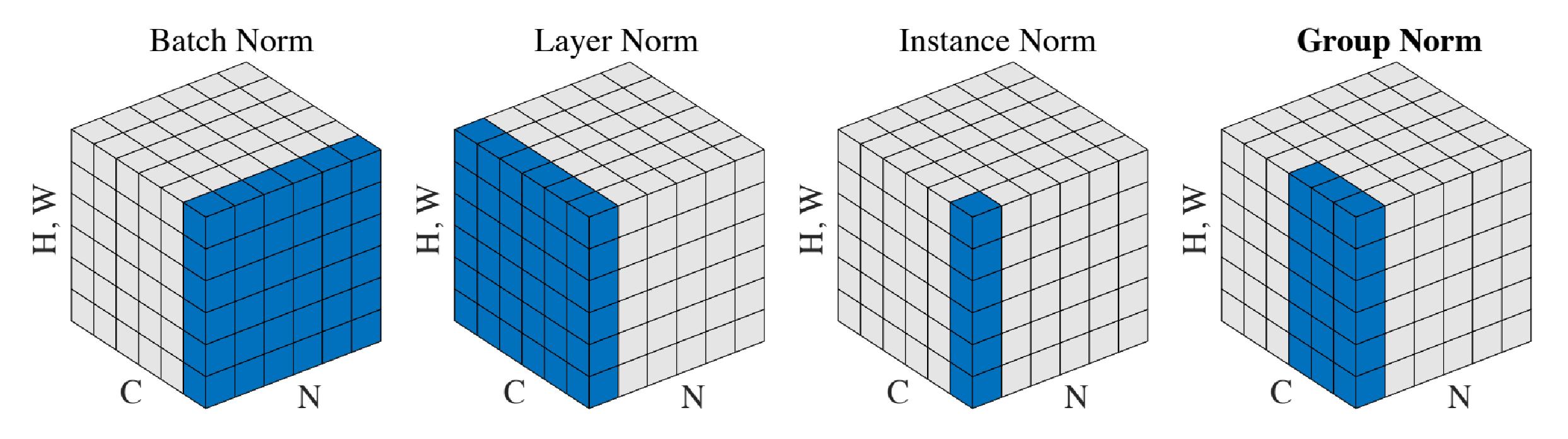
层归一化 (Layer Normalization)4:
-
动机:深层网络在计算时连续乘上多个矩阵,中间激活函数输出会特别不稳定(过大或过小)。
-
方式:在特征维度 (Channel) 上计算均值和方差。
\[ \hat{a} = \frac{a - \mu}{\sigma} \] -
说明:NLP 中不用 CNN 常用的 Batch Norm(跨样本取平均),而是用 Layer Norm(单个样本内跨特征取平均),因为句子长度往往不一。
-
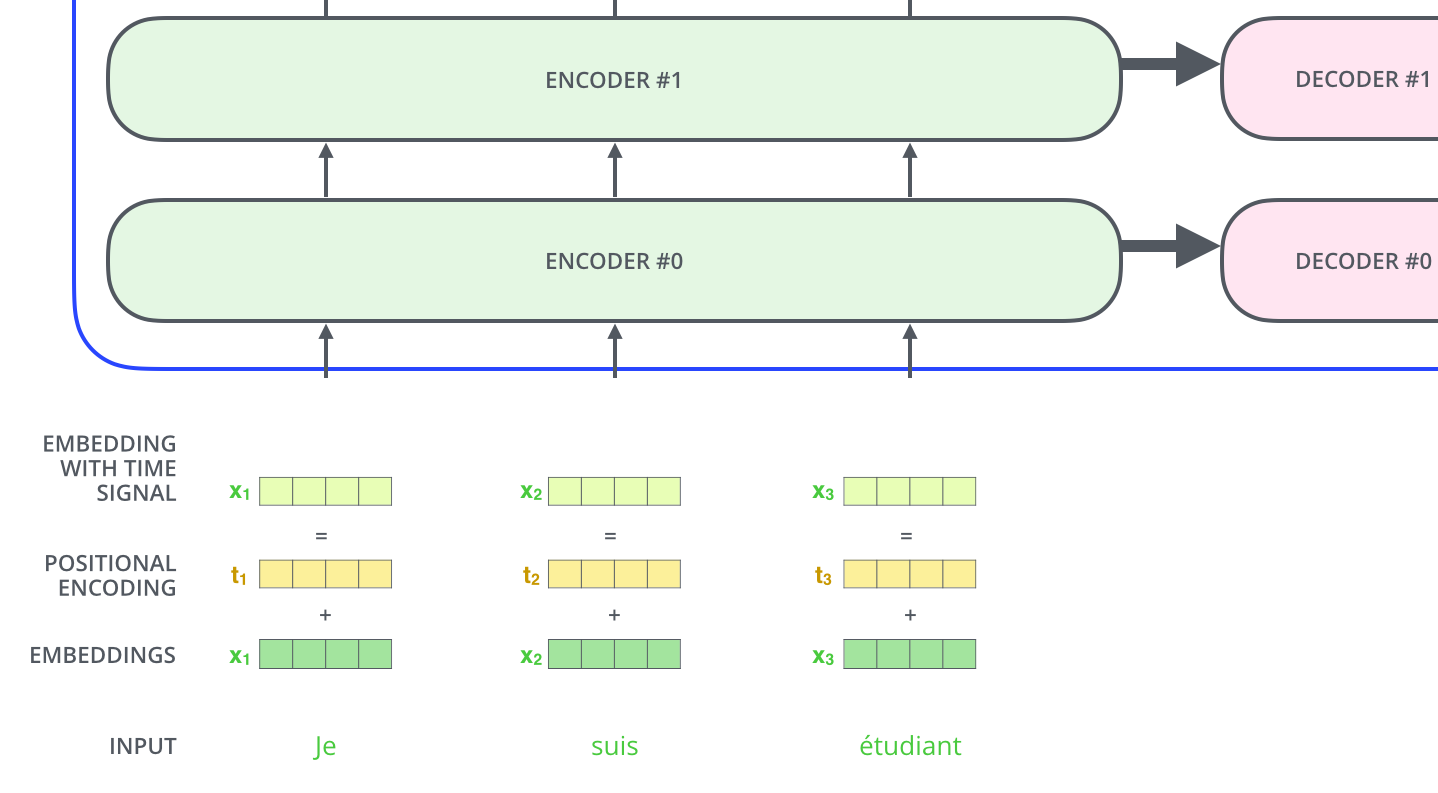
位置编码 (Positional Encoding)¶
-
痛点:因为 Self-Attention 只是做全连接式的全局加权,丢失了序列中 Token 的顺序信息。(对模型来说,"I have this book to read" 和 "I have to read this book" 看上去是一样的)。
-
解决方案:引入绝对/相对位置的感知。
-
三角函数位置编码:利用不同波长、不同相位差的正余弦函数,为每个位置生成一个唯一向量。
-
融合方式:直接将位置编码相加到输入序列的词嵌入向量上(Embedding + Position Encoding)。
解码器 (Decoder)¶
![]()
-
关键差异:解码器的整体组件与编码器非常相似,但在结构和运行机制上存在几个关键差异:
-
运行机制(自回归,Autoregressive):编码器是一次性并行处理整个输入序列,而解码器在推理阶段是逐个 Token 生成的。当前时间步输出的词,会作为下一个时间步解码器的输入(同样需要先经过 Embedding 并加上位置编码)。
-
核心组件:每个解码器除了包含与编码器相同的自注意力层和前馈层之外,还多出了一个编码器-解码器注意力层(Encoder-Decoder Attention),并且其底层的自注意力层是掩蔽的(Masked)。
-
-
工作流程:
-
获取编码器输出 (Encoder Output):最顶层编码器处理完输入序列后,其输出会被转换为一组注意力向量 \(K\) (Key) 和 \(V\) (Value)。这组向量将被“派发”给所有解码器的“编码器-解码器注意力层”使用。
-
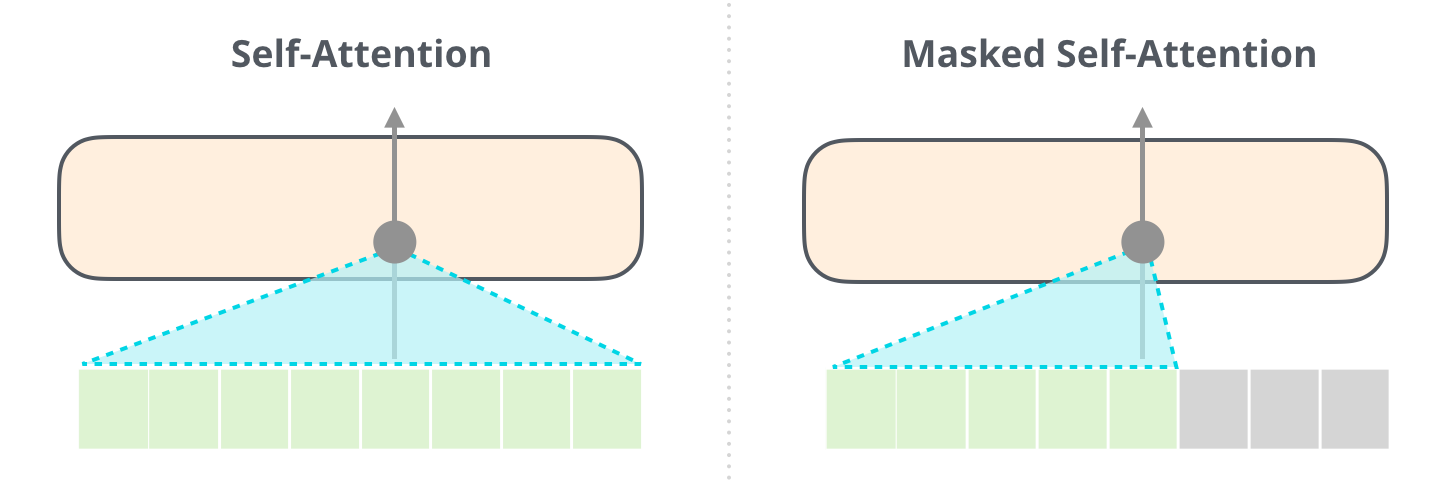
掩蔽自注意力层 (Masked Self-Attention Layer):
-
在生成序列时,模型只能根据已经生成的词来预测下一个词,不能提前偷看未来的词。
-
实现方式:在计算 Self-Attention 的得分阶段,将未来位置对应的得分掩蔽掉(Masking)。具体操作是在传给 Softmax 函数之前,把未来位置的打分设为极小的负数(如 \(-\infty\)),这样 Softmax 归一化后它们的概率就变成了 0。
-
-
编码器-解码器注意力层 (Encoder-Decoder Attention Layer):
-
工作机制:与普通的多头自注意力唯一的区别在于数据的来源:
-
\(Q\) (Query):来自解码器底层(即掩蔽自注意力层)的输出。
-
\(K\) (Key) 和 \(V\) (Value):直接来自 编码器的顶层输出。
-
-
意义:这一步让解码器在生成当前词时,能够“拿着当前的查询条件(\(Q\)),去原始输入序列(\(K, V\))中寻找最相关的上下文信息”,相当于人类翻译时“视线在原文和译文之间来回切换”的过程。
-
-
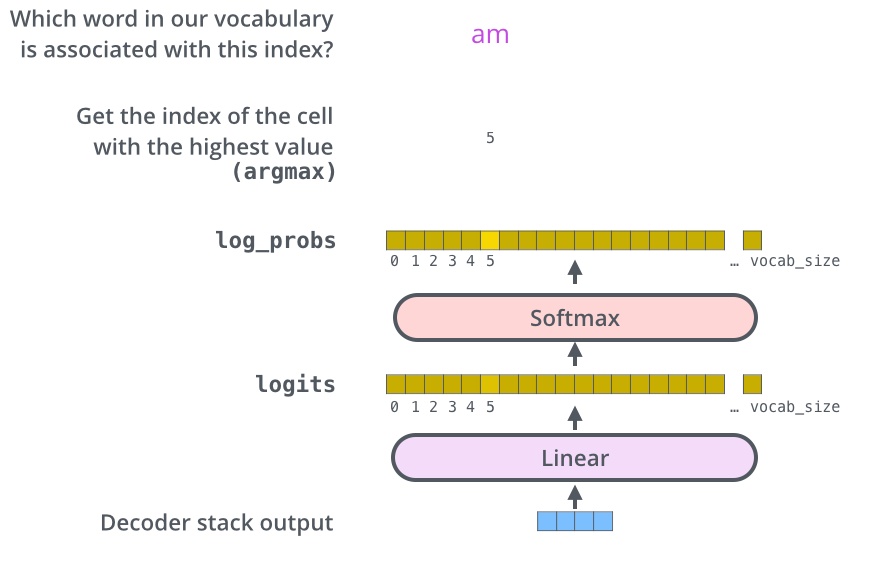
最终的线性层与 Softmax 层 (Final Linear and Softmax Layer)¶
解码器堆叠层的最终输出是一个由浮点数组成的向量,需要最后的线性层和 Softmax 层将这个浮点向量转换成人类能读懂的单词。
-
线性层 (Linear Layer):一个简单的全连接前馈神经网络。
-
将解码器输出的相对低维的特征向量投影(Project)到一个极大的向量中,这个超大向量被称为 Logits 向量。
-
Logits 向量的宽度恰好等于模型所掌握的词表大小(Vocabulary Size),每一列对应的就是一个独特单词的得分。
-
-
Softmax 层 (Softmax Layer):
-
将 Logits 向量中各个词的原始得分转化为概率分布(所有值都为正数,且总和为 1.0)。
-
选取概率值最高的那个单元格,其对应的单词即作为该时间步模型的最终输出结果。
-
Transformer 的优缺点和演进方向¶
优缺点¶
-
优点:
-
长距离依赖 (Long-term Dependencies):RNN 在长序列会有遗忘问题,而 Transformer 的任意两个 Token 之间通过 Attention 计算距离永远是 1。
-
高度并行化 (Parallelization):RNN 的第 \(t\) 步计算依赖第 \(t-1\) 步,无法并行;Transformer 在训练时可一次性计算整句话的 Attention,大幅利用 GPU 算力。
-
全局感受野 (Global Context):相比 CNN 受限于局部卷积核,Transformer 能无死角地获取全局信息。
-
可解释性 (Interpretability):通过可视化 Attention Map,我们可以清晰地看到模型把重点放在了哪些词或像素上。
-
-
缺点:
-
计算复杂度极高:因为任意两个 Token 都要算点积,时间与空间复杂度关于序列长度 \(n\) 是 \(O(n^2)\) 的。
-
序列长度有限:因 \(O(n^2)\) 的存在,处理极长文档(如百万字小说)会导致内存爆炸。
-
演进方向¶
为了解决 Transformer \(O(n^2)\) 的计算复杂度以及大模型时代的显存墙问题,工业界和学术界提出了诸多极其关键的底层优化:
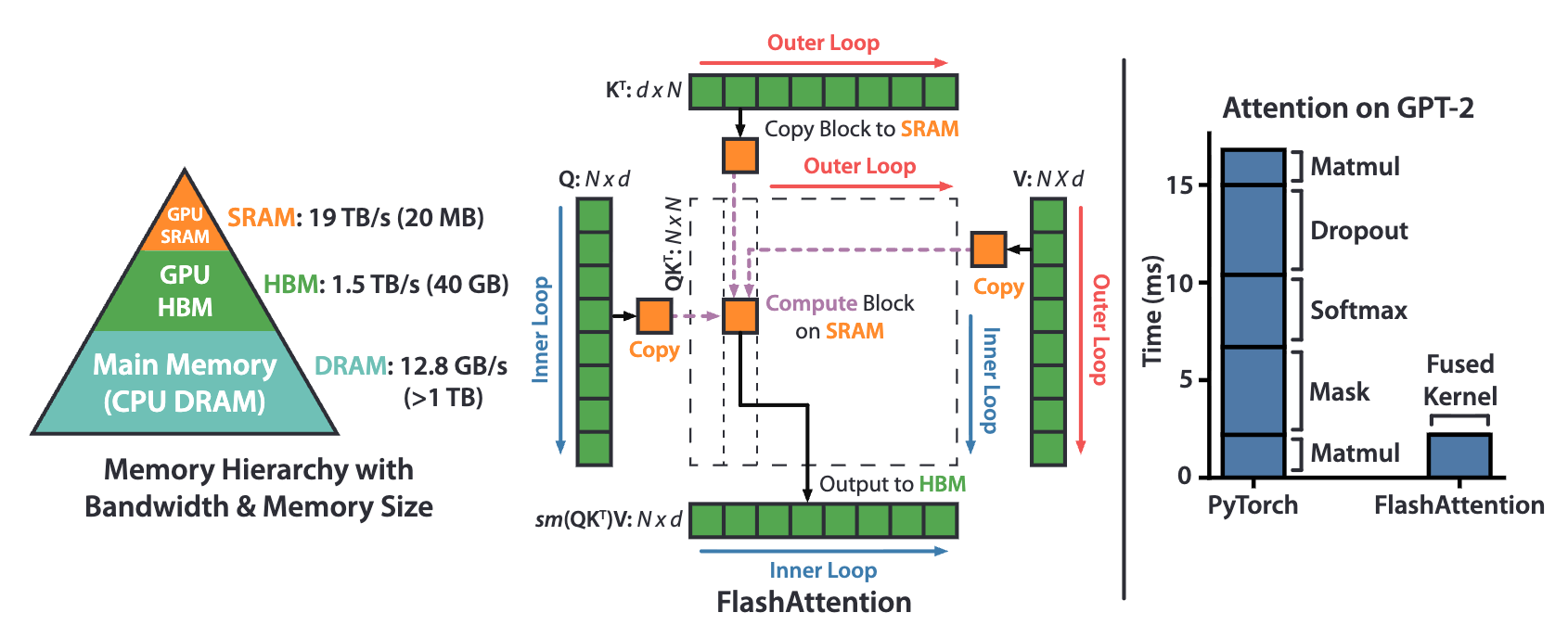
硬件感知的注意力加速:FlashAttention5¶
-
痛点 (Memory Wall):标准的 Attention 计算包含了多步独立的操作(Matmul \(\to\) Mask \(\to\) Softmax \(\to\) Dropout \(\to\) Matmul)。在 GPU 中,每一步都会将庞大的中间结果(大小为 \(N \times N\))在计算单元(SRAM,极快但极小)和主存(HBM/DRAM,大但极慢)之间来回读写,导致极大的时间延迟(IO 瓶颈)。
-
FlashAttention 机制:
-
分块计算 (Tiling / Block computation):将 \(Q, K, V\) 矩阵切分成小块(Blocks),分批载入到高速 SRAM 中。
-
算子融合 (Kernel Fusion):在 SRAM 中一次性完成点积、Softmax 和加权求和,然后直接将最终输出写回 HBM,期间完全不保存任何 \(N \times N\) 的中间注意力矩阵。
-
-
效果:显著降低了显存读写次数,极大提升了模型训练和推理的速度,并大幅降低了显存占用。
解码推理加速核心:KV Cache67¶
- 痛点:GPT 等 Decoder-only 架构在生成文本时是自回归(Autoregressive)的,即每次只生成一个新 Token。如果每次生成新词时,都要把前面所有历史词的 \(Q, K, V\) 重新计算一遍,会造成巨大的重复计算浪费。
-
KV Cache 机制:
-
KV Cache 缓存:在推理生成第 \(t\) 个 Token 时,前面 \(1\) 到 \(t-1\) 个 Token 的键矩阵 \(K\) 和值矩阵 \(V\) 是绝对不会改变的。因此,模型在内存中维护一个缓存区(KV Cache),把历史的 \(K\) 和 \(V\) 存下来。
-
当前步计算:当新 Token 进来时,只需计算这一个新 Token 的 \(Q, K, V\)。用新的 \(q_t\) 去和 缓存中的所有历史 \(K\) 以及新的 \(k_t\) 做点积注意力,得到结果后再将新的 \(k_t, v_t\) 追加进缓存即可。
-
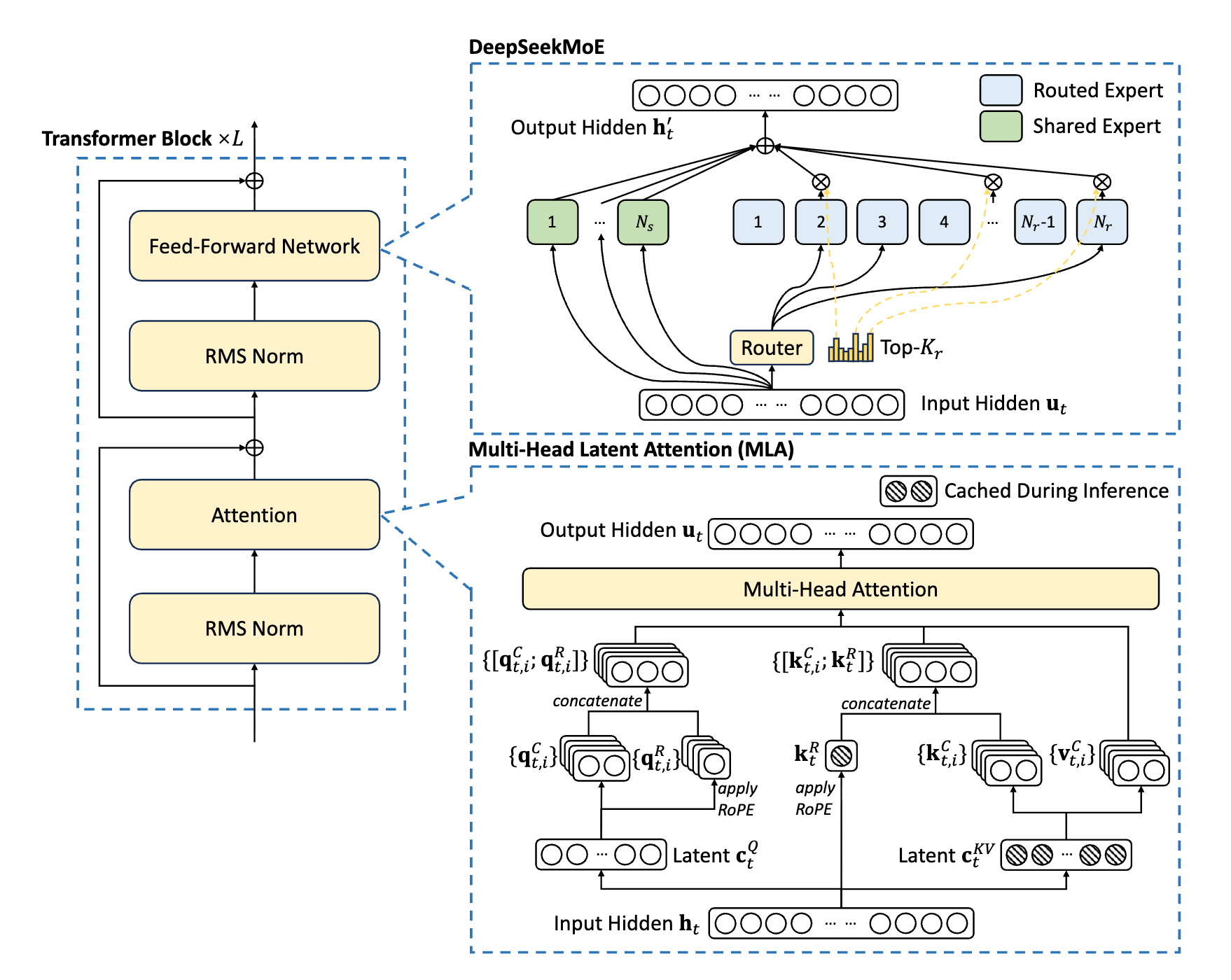
架构前沿演进:DeepSeek 的底层创新8¶
面对极长上下文和海量参数,DeepSeek 等前沿技术报告提出了进一步的架构演进:
-
混合专家架构 (DeepSeekMoE):
-
痛点:传统前向传播网络(FFN)中,每个 Token 都要经过所有的神经元,计算量巨大。
-
MOE 机制:
-
MoE 引入了路由器(Router)机制,包含 共享专家(Shared Expert)和 路由专家(Routed Expert)。
-
路由器 (Top-\(K\)) 决定将当前 Token 仅分发给极少数最擅长处理该特征的专家网络中,实现了 参数量大但计算量小 的稀疏激活。
-
-
-
多头潜在注意力 (MLA, Multi-Head Latent Attention):
-
痛点:传统的 KV Cache 在长文本推理时会占用几十上百 GB 的显存,极大限制了并发推理的数量。
-
MLA 机制:
-
不再直接缓存庞大的多头 \(K\) 和 \(V\) 矩阵,而是通过一个 潜空间向量 (Latent \(c_t^{KV}\)) 对 KV 进行大幅度的降维压缩,只有在推理需要时,才动态地将其投射恢复。
-
同时解耦了旋转位置编码 (RoPE) 的计算,使得极长上下文的 KV Cache 内存占用成倍下降,极大提升了推理并发量。
-
-