Ch4 Cache 存储器¶
Cache 的传输单位¶
-
字:存储器组织的天然单位,存储器单次传输所能传输数据的宽度
-
可寻址单元:能唯一确定地址的最小单位。一般是字或字节。
- 地址位数 \(A\) 与可寻址单元个数 \(N\):\(2^A=N\)
-
传输单位:
-
对主存:一次读出/写入存储器的位数,通常是数据总线宽度。
-
对外存:以块为单位
-
Cache 访问数据单元的方式¶
-
顺序访问:必须以特定线性顺序访问,访问时间高度变化。
- 磁带
-
直接访问:存储器中每个数据块有唯一地址,以此先通过块间跳转找到块,再在块内顺序搜索定位可寻址单元。访问时间变化。
- 磁盘
-
随机访问:存储器中每个可寻址位置都是唯一的,以此直接定位可寻址单元。访问时间固定。
- 主存
-
关联存取:属于随机访问类型的存储器,根据数据部分内容确定存储位置,存取时间与数据位置无关。
- Cache
Cache 性能¶
-
访问时间(延迟):
-
对随机访问存储器:读写操作所需时间
-
对非随机访问存储器:定位时间
-
-
存储器周期时间:随机访问存储器,访问时间+第二次访问开始前所需额外时间
-
传输速率:通常以 \(bit/s(bps)\) 为单位
-
对随机:
\[ \text{传输速率}=\frac{1}{\text{周期时间}} \] -
对非随机:
-
\[ T_n=T_A+\frac{n}{R} \]
-
\(T_n=\) 读/写 n 位的平均时间;
-
\(T_A=\) 平均访问时间;
-
\(n=\) 位数;\(R=\) 传输速率,以 \(bps\) 为单位。
-
-
Cache 特性¶
-
越快越贵
-
越快越耗能
-
越大越慢
-
越大越便宜
-
越大越耗能
访问局部性原理:¶
-
在程序执行期间,CPU 对指令、数据的访问往往比较集中,即在某一段时间内,CPU 对某些指令或数据的访问频率较高,这种现象称为访问局部性。
-
时间局部性:如果某个数据被访问过,那么在不久的将来,它很可能会再次被访问。
-
空间局部性:如果某个数据被访问过,那么它附近的数据很可能会被访问。
-
存储器分层:¶
-
从上至下:
-
容量越来越大
-
每位价格越来越便宜
-
速度越来越慢
-
访问频率越来越低(依赖于访问局部性原理)
-
Cache 原理和操作:¶
-
主存由多个块构成,每个块包含 \(K\) 个字。
-
Cache 由多个块构成,每个块称为一行,每行包括 \(K\) 个字以及若干位标签、控制位(行的大小为 \(K\) 个字,不算标签和控制位)。
-
主存和 Cache 之间以块为单位传输,Cache 和 CPU 之间以字为单位传输。
-
Cache 读操作:
-
检查数据是否在 Cache 中;
-
若命中,直接访问 Cache;
-
若缺失,从主存中加载包含这个字的块,并将这个字送到 CPU 中,两个操作同时发生。
-
-
Cache 写操作:
-
检查数据是否在 Cache 中;
-
若命中,直接更新 Cache 行;
-
若缺失,从主存中加载包含这个字的块,并更新 Cache 行。
-
主存块与 Cache 行之间的映射方式¶
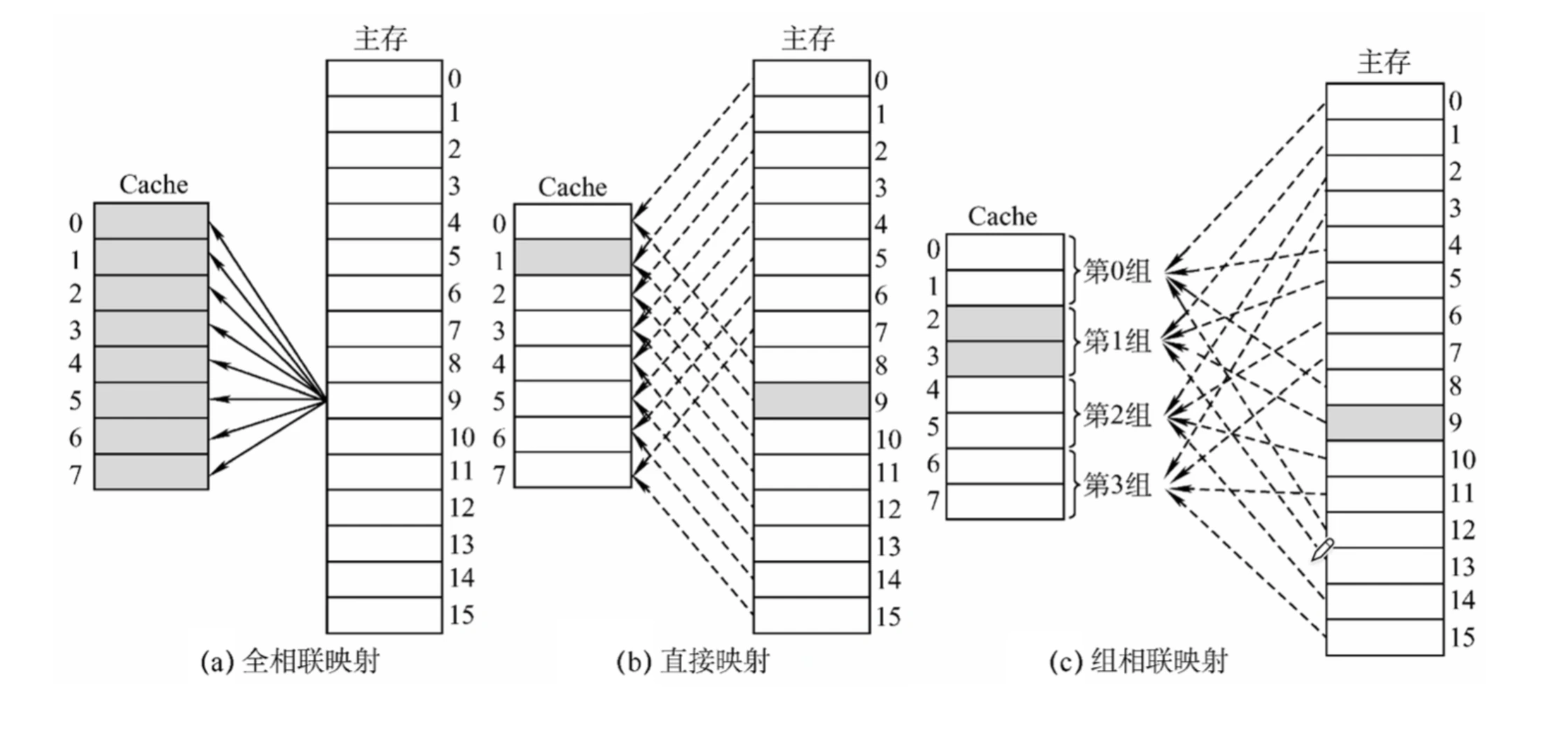
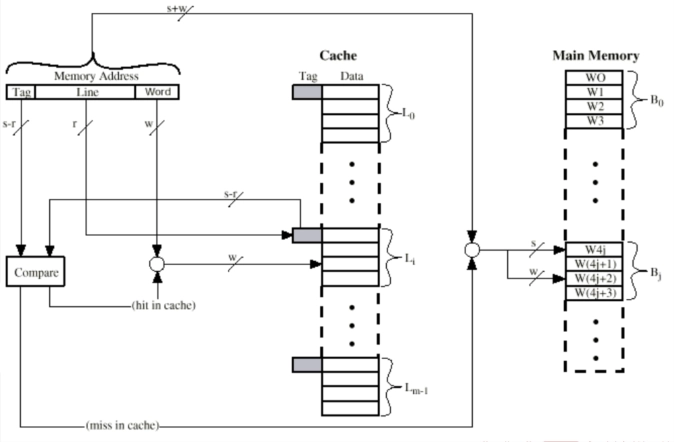
直接映射¶
\(i=\) 高速缓存行号;\(j=\) 主存块号;\(m=\) 高速缓存行总数。
-
从主存来看:
-
主存地址长度 = \((s+w)\) 位,其中最低 \(w\) 位指定主存的一个块内的 \(2^w\) 个字中的一个字/字节,剩下 \(s\) 位指定主存内的 \(2^s\) 个块中的一块
-
可寻址单元个数 = \(2^{(s+w)}\) 个字/字节
-
块大小=行大小 = \(2^w\) 个字/字节
-
-
从 Cache 来看:
-
主存地址最高 \(s\) 位 = 低 \(r\) 位 + 高 \((s-r)\) 位,其中低 \(r\) 位指定 Cache 的 \(2^r\) 行中的一行,高 \((s-r)\) 位被当作标签存储。
-
Cache 行数:\(2^r\) 行
-
Cache 大小:\(2^{(r+w)}\) 个字/字节
-
标签大小:\((s-r)\) 位
-
即:\((s-r)\) 位标签 + \(r\) 位 Cache 内行号 = \(s\) 位主存块号
-
-
优点:简单便宜
-
缺点:任何给定块都只有固定的 Cache 存储位置。若程序需要访问的两个块正好映射到同一行,这两个块就会不断交换,降低命中率,称为抖动。
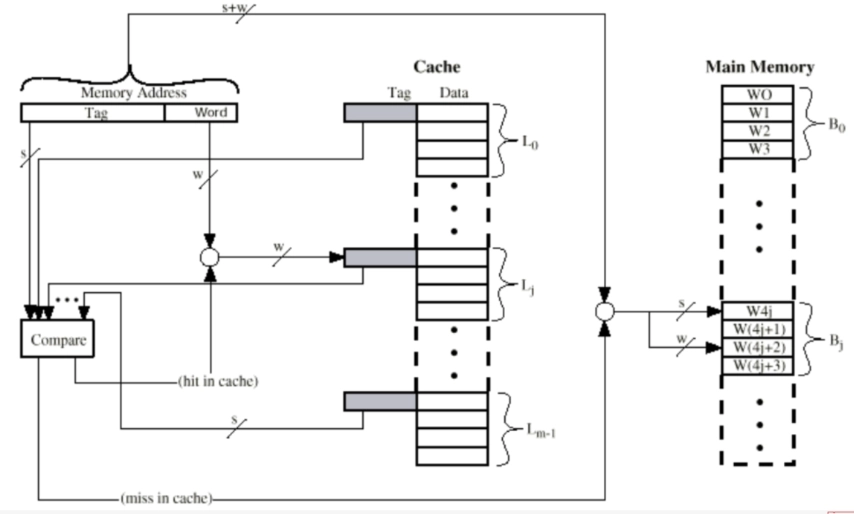
全关联映射:¶
允许每个主存块加载到任意 Cache 行,标签 = 主存块号
-
优点:命中率提高
-
缺点:访问时需要复杂电路并行检查全部行的标签
K 路组关联映射¶
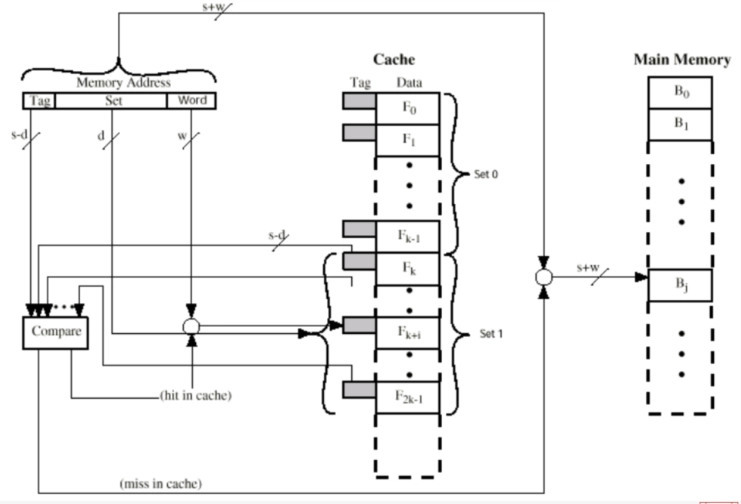
\(i\) = Cache 的组号;\(j\) = 主存块号;\(m\) = Cache 中的行数;\(v\) = 组数;\(k\) = 每组中的行数。
-
从主存来看:
-
主存地址长度 = \((s+w)\) 位,其中最低 \(w\) 位指定主存的一个块内的 \(2^w\) 个字中的一个字/字节,剩下 \(s\) 位指定主存内的 \(2^s\) 个块中的一块
-
可寻址单元个数 = \(2^{(s+w)}\) 个字/字节
-
块大小 = 行大小 = \(2^w\) 个字/字节
-
-
从 Cache 来看:
-
主存地址最高 \(s\) 位 = 低 \(d\) 位 + 高 \((s-d)\) 位,其中低 \(d\) 位指定 Cache 的 \(2^d\) 组中的一组,高 \((s-d)\) 位被当作标签存储。
-
Cache 组数:\(v=2^d\) 行
-
Cache 行数:\(m=kv=k\times 2^d\)
-
Cache 大小:\(k\times 2^{(d+w)}\) 个字/字节
-
标签大小:\((s-d)\) 位
-
即:\((s-d)\) 位标签 + \(d\) 位 Cache 内组号 = \(s\) 位主存块号
-
-
优点:灵活,标签较小,且只需并行比较组内的 \(k\) 个标签
替换算法¶
当 Cache 已满而又有新块需要调入,就必须替换 Cache 中的块。
-
最近最少使用算法(LRU)
- 替换组内在 Cache 中最久没有被引用过的块。以 2 路组关联为例,当组中一行被引用时,其 USE 位置 1,另一行 USE 置 0。替换时选择 USE 为 0 的行。
-
先进先出算法(FIFO)
- 替换组内最早进入 Cache 的块。
-
最不经常使用(LFU):
- 替换组内使用频率最低的块。
-
随机
- 随机选择组内的一个块进行替换。
写策略¶
-
通写(写直达):所有写都会施加于 Cache 和主存。任何其他处理器和 Cache 都可以监视到主存的改变以维护一致性。
-
优点:简单
-
缺点:产生大量主存流量,让写变慢
-
-
回写:CPU 写的更新仅在 Cache 中执行,此时 USE 为置 1。当一个块被替换时,仅当 USE 位为 1 才会被写回主存。
-
优点:最小化主存写操作
-
缺点:部分主存在块替换前是无效的,IO 存取只能通过 Cache 进行。
-
行/块大小¶
随着行大小从很小到较大,命中率先上升后下降。
-
原因:
-
行较大时 Cache 中行数较少;
-
行较大时离访问位置较远的字再次访问概率低(局部性原理)
-