外部查找与排序¶
主存储器与外存储器¶
-
主存储器:也被称为内存,是存储正在运行的程序代码及处理数据。
-
外存储器:用于存储长期保存的信息。常用的外存储器有磁盘、磁带、光盘、U 盘等,访问速度慢,故需考虑减少访问次数。
-
外存储器中的信息以文件为单位。每个文件在内存有一个缓冲区存放正在处理的文件中的数据
-
外存储器以数据块为单位与内存交换信息。当程序需要处理外存储器中的某个数据,则将包含该数据的数据块读入缓冲区进行处理
-
B 树¶
B 树的定义¶
一棵 \(m\) 阶 B 树或者为空,或者满足以下条件。
-
根结点要么是叶子,要么至少有两个儿子,至多有 \(m\) 个儿子。
-
除根结点和叶子结点之外,每个结点的儿子个数 \(s\) 满足 \(\lceil m/2 \rceil \leq s \leq m\)。
-
有 \(s\) 个儿子的非叶结点具有 \(n = s - 1\) 个关键字,故 \(s = n + 1\)。这些结点的数据信息为
\[ (n,A_0,(K_1,R_1),A_1,(K_2,R_2),A_2,\cdots,(K_n,R_n),A_n) \]其中:
-
\(n\): 关键字的个数
-
\(K_1,K_2,\cdots,K_n\): 结点的关键字,且 \(K_1 \lt K_2 \cdots \lt K_n\)
-
\(A_0\): B 树中小于 \(K_1\) 的结点的地址
-
\(R_j\): 关键字值等于 \(K_j(1 \leq j \leq n)\) 的数据记录在硬盘中的地址
-
\(A_j\): B 树中大于 \(K_j\) 且小于 \(K_{j + 1}(1 \leq j \leq n - 1)\) 的结点的地址
-
\(A_n\): B 树中大于 \(K_n\) 的结点的地址
-
-
所有的叶子结点都出现在同一层上,即它们的深度相同,并且不带信息(可以认为是外部结点或查找失败的结点,这些结点并不存在,指向这些结点的指针为空)。
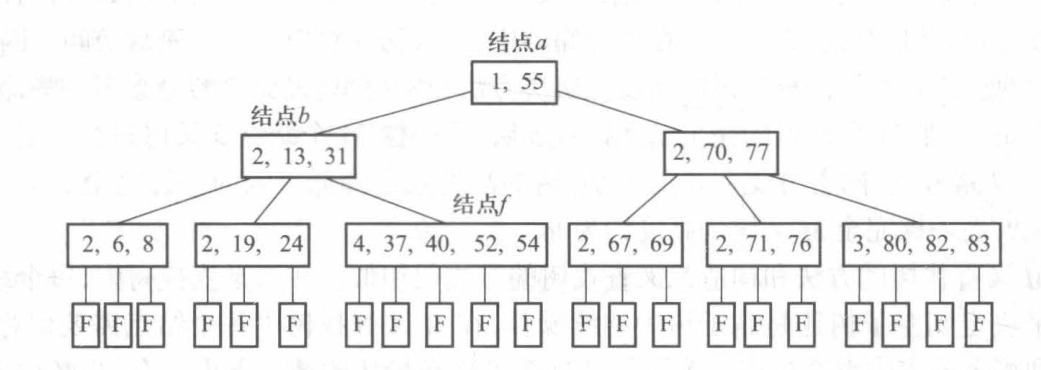
B 树的查找¶
B 树的查找过程与二叉查找树类似,但由于 B 树的每个结点可以有多个关键字,因此查找过程需要在结点内部进行线性查找。
-
从根结点开始,比较要查找的关键字与根结点的关键字。
-
如果找到相等的关键字,则查找成功。
-
如果要查找的关键字在根结点关键字之间,则继续在根结点的某个子树中查找。
-
重复以上步骤,直到找到关键字或到达叶子结点。
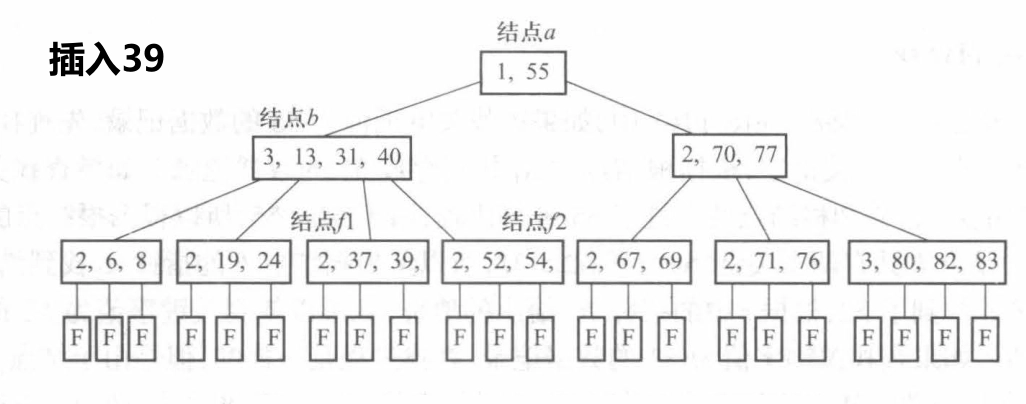
B 树的插入¶
首先在 \(m\) 阶 B 树上进行查找操作,确定新插入的关键字 key 在最底层的非叶结点的插入位置,将 key 和其他信息按序插入最底层上的某个结点。
-
若被插入结点的关键字个数小于 \(m-1\) ,则插入操作结束
-
若该结点原有的关键字个数已经等于 \(m-1\) ,必须分裂成两个结点
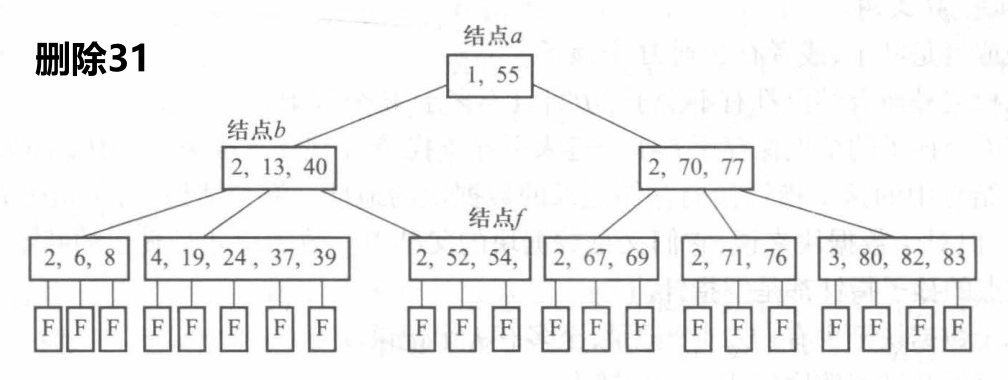
B 树的删除¶
类似二叉查找树的删除操作,从根结点开始查找与给定关键字值 key 相等的关键字 \(K_i\)。关键字 \(K_i\) 可能出现在第一层到最底层之间的任何一个结点上,计有以下几种情况:
-
如果关键字 \(K_i\) 在最底层,可直接删除,转 (3) 。
-
否则,先找到“替身”。用它的右子树中的最左面的结点的关键字值,即处于最底层上的最小关键字值取代。然后,删除最底层上的该关键字。
-
从最底层开始进行删除相应关键字的操作,计有以下几种情况:
-
若删除关键字之后,结点的关键字的个数仍处于 \([\lceil m/2 \rceil - 1, m - 1]\) 之间,仍满足 B 树的结点的定义,删除结束。
-
若结点的关键字的个数原为 \([\lceil m/2 \rceil - 1]\),若再删除一个关键字,将不符合 B 树定义。如果该结点的左或右兄弟结点的关键字的个数大于 \([\lceil m/2 \rceil - 1]\),则借一个关键字过来。必须注意的是,并不是直接将左或右兄弟结点的关键字取过来,因为这样将无法保证结点的关键字有序。如果是借左兄弟结点的最大关键字,则必须将该关键字上移到父结点的相应位置,而将父结点中大于该关键字且最接近该关键字的那个关键字(连同左兄弟结点的最右方的指针 \(A_n\))下移到被删关键字所在结点的最左面,删除操作结束。若借右兄弟结点的最小关键字,操作类似。
-
若该结点的左或右兄弟结点的关键字的个数都为 \([\lceil m/2 \rceil - 1]\),那么将无结点可借。这时只能执行合并结点的操作。将该结点同左兄弟(无左兄弟时,与右兄弟)合并。由于两个结点合并后,父结点中相应的关键字将不再保留,因为它原来的左右儿子已经不存在,因此,把父结点中该关键字也并入合并后的结点。这样,父结点的关键字个数便减少了一个。如果父结点的关键字个数不满足定义,则必须继续调整。在最坏情况下,调整可能会一直波及到根结点,导致 B 树的高度减少 1,即减少一层。
-
B 树占用空间的情况¶
将一个磁盘块作为一个 B 树的结点。假设一个块的容量 \(max\) 字节,如果每个键要占用 \(key\) 个字节。在一棵 \(M\) 阶 B 树中,可以有 \(M-1\) 个键,总的数据量是:
B+ 树¶
B+ 树的定义¶
-
B 树不适合顺序访问
-
B+ 树既能提供随机查找,也能提供顺序访问的存储结构。
- B+ 树的所有关键字都在叶子结点中,并且叶子结点之间通过指针相连
-
一棵 \(M\) 阶的 B+ 树被定义为具有以下性质的 \(M\) 叉树:
-
根或者是叶子,或者有 \(2\) 到 \(M\) 个孩子。
-
除根之外所有结点都有不少于 \(\lceil M/2 \rceil\) 且不多于 \(M\) 个孩子。
-
有 \(K\) 个孩子的结点保存了 \(K-1\) 个键来引导查找,键 \(1\) 代表了子树 \(i+1\) 中键的最小值。
-
叶结点中的孩子指针指向存储记录的数据块的地址。换句话说,对于索引 B+ 树,它们是叶结点。但对于数据块来说,它们又是数据块的父结点。数据块才是真正的叶结点。而在 B 树中,叶结点的孩子指针都是空指针。
-
每个数据块至少有 \(\lceil L/2 \rceil\) 个记录,至多有 \(L\) 个记录。
-
所有的叶结点按序连成一个单链表。
-
-
B+ 树存储两个指针
-
指向树根的指针,提供了索引查找
-
指向关键字最小的叶结点,提供顺序访问
-
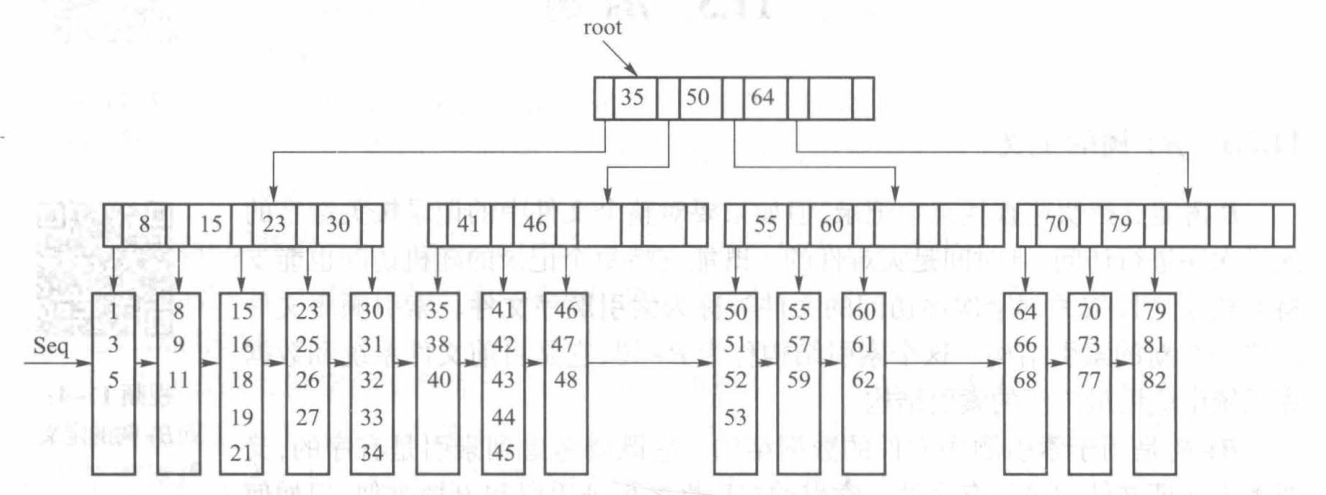
B+ 树的查找¶
与二叉查找树类似,在 B+ 树上查找某一条记录也是从根结点开始,根据结点中的键值决定查找哪一棵子树。一层一层往下找,直到找到该记录应该存放的数据块。在数据块中查找被查找的记录,找到了则表示查找成功,没有找到则表示该记录不存在。
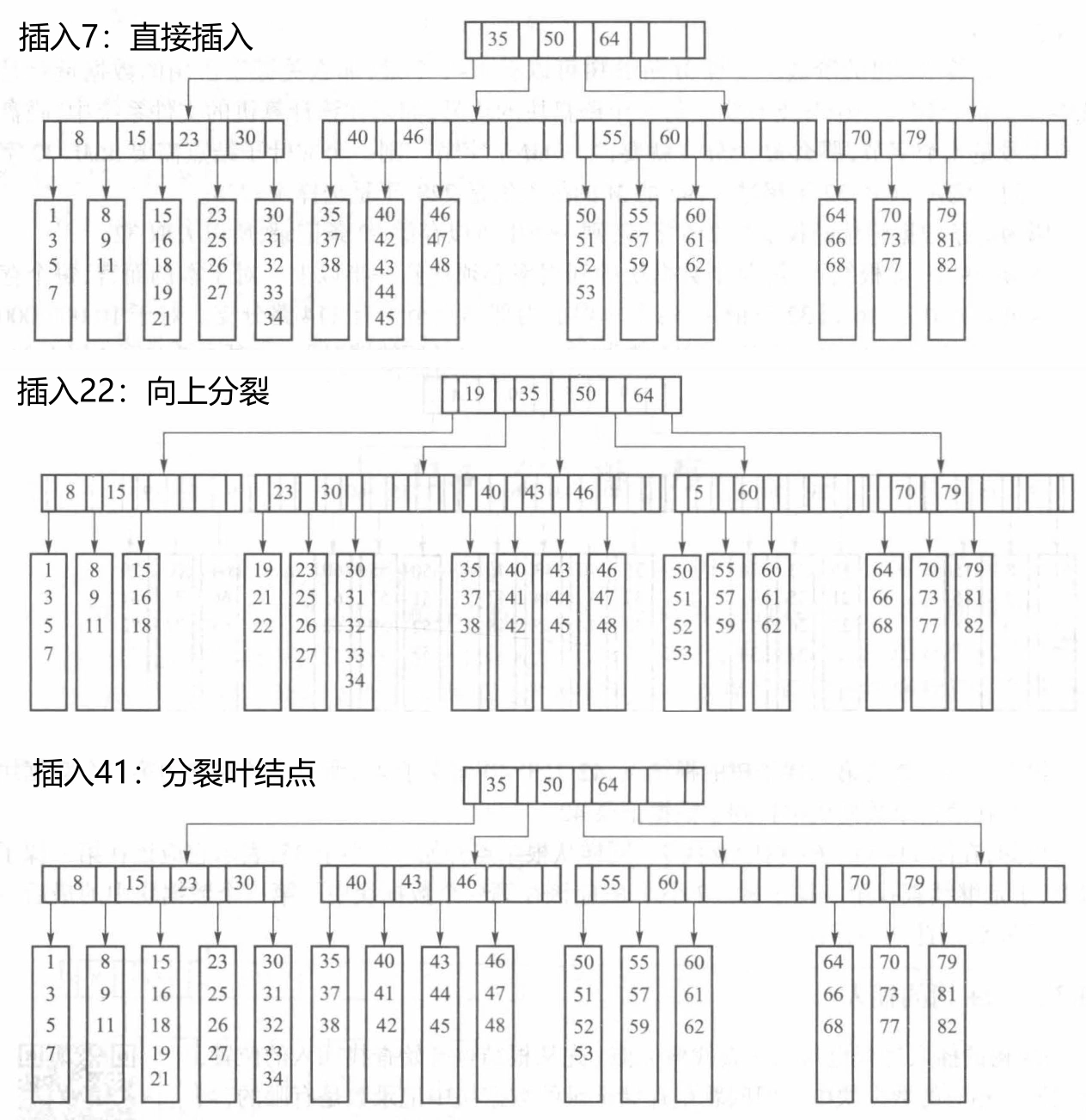
B+ 树的插入¶
从根结点开始查找插入的位置,把它插入相应的数据块中:
-
若存放被插入记录的数据块还没有放满:直接插入
-
若已满:分裂叶结点
- 若父结点也已满,则继续向上分裂,直至父亲直到不需要再分裂或者到达了根结点。若到达根结点,则重新建立一个根,让这两个分裂出来的根做它的两个子结点
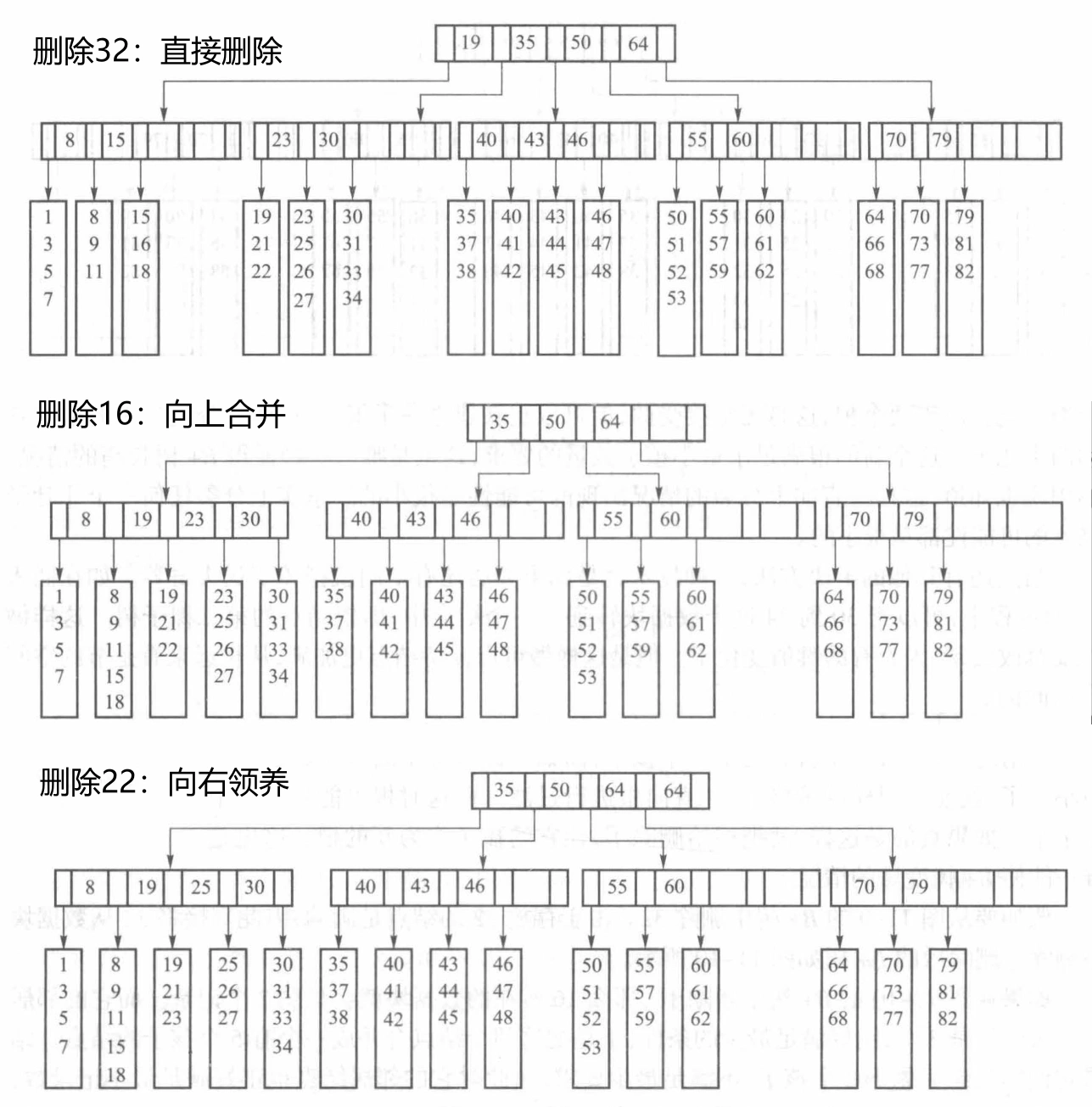
B+ 树的删除¶
删除操作首先查找到要删除的项,然后删除它。
-
如果此时它所在的叶子的元素数量正好满足要求的最小值,删除该项就会使它低于最小值
-
如果邻居不是最少的情况,就借一个过来领养;
-
如果邻居也处于最少的情况,就把两个结点合并成一个满的结点。
-
在这种情况下父亲就失去了一个儿子。如果它引起父亲的儿子数少于了最小值,则需要一直向上进行过滤到根。
-
如果根只剩下了一个儿子,就把根删除,让它的儿子作为新的树根,这也是唯一能使 B 树变矮的情况。
-
-
外排序¶
在外存上进行排序的最常用的方法是利用归并排序,因为归并排序只需要访问被归并序列中的第一个元素,这非常适合于顺序文件。
预处理阶段¶
-
预处理阶段:根据内存的大小将一个有 n 个记录的文件分批读入内存,用各种内排序算法排序,形成一个个有序片段。
-
置换选择
-
在外排序中,已排序片段越多,归并的次数也越多。如果能够让每个初始的已排序片段包含更多的记录,就能减少已排序片段数,就能减少排序时间。
-
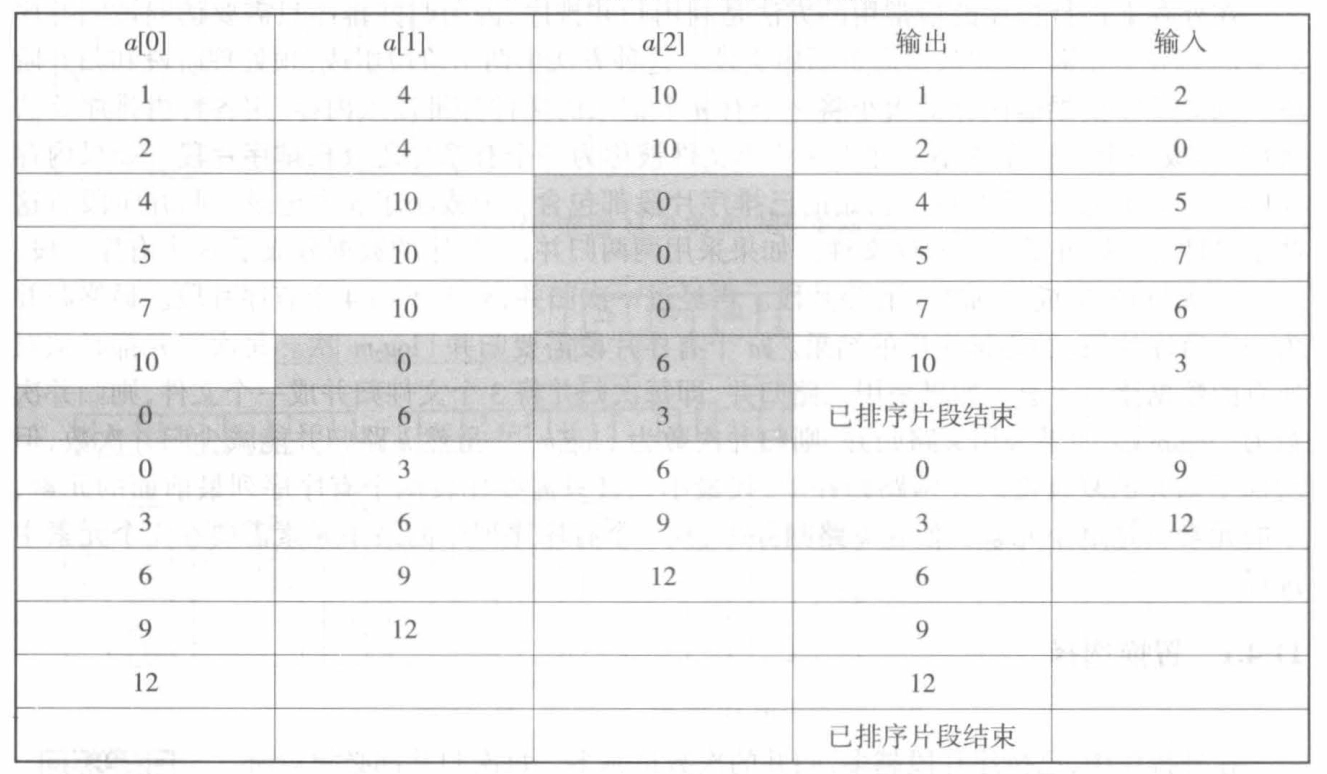
置换选择可以在只能容纳 \(p\) 个记录的内存中生成平均长度为 \(2p\) 的初始的已排序片段。
-
基于每个小片段采用选择排序。每次选出的最小记录直接被写到输出文件上,它所用的内存空间就可以给别的元素使用,此时可以从输入文件读入一个新记录。如果它比刚才写出去的元素大,则把它加入到优先级队列;否则,它不可能进入当前的已排序片段,该元素就被放于优先级队列的空余位置,用于下个片段的排序。
-
-
文件上的数据为 \(1,4,10,2,0,5,7,6,9,12\) ,内存中能够容纳 3 个记录,这 3 个记录存放在数组 a 中。构造初始的已排序片段的过程如下图。由于采用了置换选择法,使得对 11 个记录只生成了两个初始的已排序片段,这样只需要一次归并就能排好序。
归并阶段¶
-
归并阶段:将预处理得到的已排序片段逐步归并成一个有序文件。
-
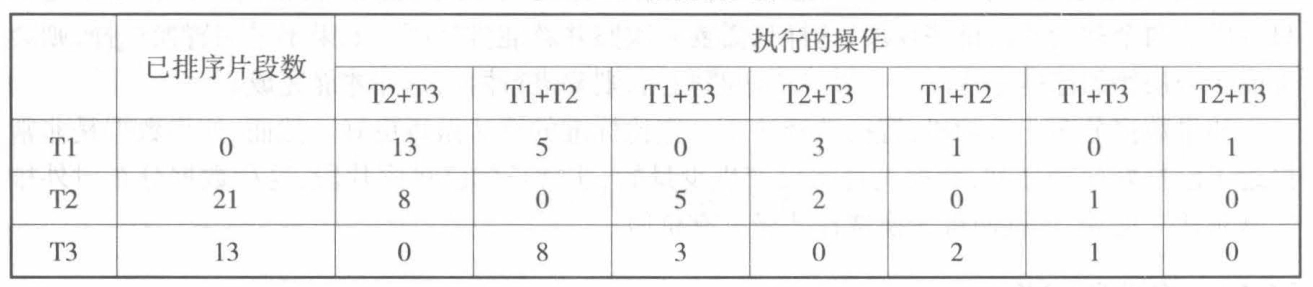
多阶段归并
-
\(k\) 路归并:如果生成的已排序片段数为 \(m\) ,则 \(k\) 路归并需要归并 \(\lceil \log_k m \rceil\) 次。
-
\(k\) 越大,归并次数越少。
-
\(k\) 路归并需要 \(2k\) 个缓冲区
-
-
使用多阶段归并,可以在只有 \(k+1\) 个缓冲区的情况下完成 \(k\) 路归并。
-