动态查找表¶
动态查找表的定义¶
-
支持增、删、查、改等操作
-
存储结构:
-
查找树
-
散列表
-
-
动态查找表的抽象类
#ifndef DYNAMICSEARCHTABLE_H
#define DYNAMICSEARCHTABLE_H
#include <bits/stdc++.h>
#include "8-1-set.h"
using namespace std;
template <class KEY, class OTHER>
class dynamicSearchTable {
public:
virtual SET<KEY, OTHER>* find(const KEY& x) const = 0;
virtual void insert(const SET<KEY, OTHER>& x) = 0;
virtual void remove(const KEY& x) = 0;
virtual ~dynamicSearchTable() {};
};
#endif
二叉查找树¶
二叉查找树的定义¶
-
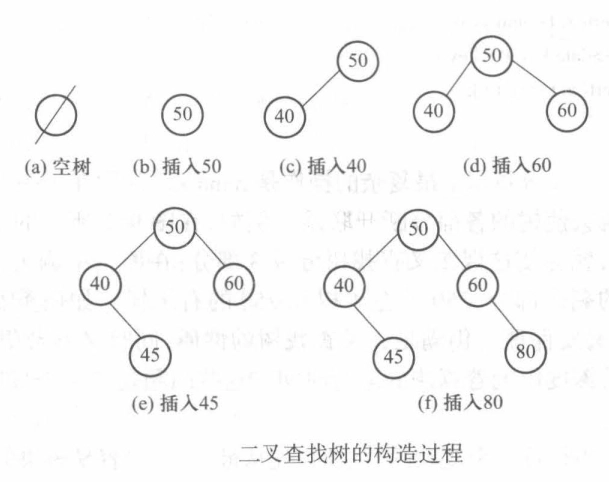
定义:二叉查找树又称二叉排序树,非空情况下满足下列条件
-
若左子树非空,则左子树上的所有非空结点的关键字值均小于根结点的关键字值
-
若右子树非空,则右子树上的所有非空结点的关键字值均大于根结点的关键字值
-
左右子树也是二叉查找树
-
-
性质:
- 中序遍历一棵二叉查找树的道德访问序列 按键值递增
二叉查找树的实现¶
-
通常采用二叉树的标准存储法
-
每个结点包含以下字段
-
数据:键值-数据对
-
左、右子结点指针
-
-
-
运算实现:
-
查找:
-
若根结点不存在,则不存在
-
若根结点关键字值等于查找值,则找到
-
若根结点关键字值大于查找值,则递归查找左子树
-
若根结点关键字值小于查找值,则递归查找右子树
-
-
插入:
-
若根结点不存在,则插入为根结点
-
若根结点关键字值大于插入值,则在左子树上递归插入
-
若根结点关键字值小于插入值,则在右子树上递归插入
-
-
删除:
-
若根结点关键字值大于待删值,则在左子树上递归删除
-
若根结点关键字值小于待删值,则在右子树上递归删除
-
若根结点关键字值等于待删值,则:
-
根结点无子结点:直接删
-
根结点有一个子结点:作为新的根结点
-
根结点有两个子结点:找到左子树的最大结点或右子树最小结点替代
-
-
-
-
时间复杂度:\(O(\log N)\)
#include "9-1-dynamicSearchTable.h"
using namespace std;
template <class KEY, class OTHER>
class binarySearchTree : public dynamicSearchTable<KEY, OTHER>
{
public:
binarySearchTree();
~binarySearchTree();
SET<KEY, OTHER>* find(const KEY& x) const;
void insert(const SET<KEY, OTHER>& x);
void remove(const KEY& x);
private:
struct BinaryNode {
SET<KEY, OTHER> data;
BinaryNode* left;
BinaryNode* right;
BinaryNode(const SET<KEY, OTHER>& thedata, BinaryNode* l=NULL, BinaryNode* r=NULL)
: data(thedata), left(l), right(r) {}
};
BinaryNode* root;
void insert(const SET<KEY, OTHER>& x, BinaryNode*& t);
void remove(const KEY& x, BinaryNode*& t);
SET<KEY, OTHER>* find(const KEY& x, BinaryNode* t) const;
void makeEmpty(BinaryNode*& t);
};
template <class KEY, class OTHER>
binarySearchTree<KEY, OTHER>::binarySearchTree()
{
root = NULL;
}
template <class KEY, class OTHER>
binarySearchTree<KEY, OTHER>::~binarySearchTree()
{
makeEmpty(root);
}
template <class KEY, class OTHER>
SET<KEY, OTHER>* binarySearchTree<KEY, OTHER>::find(const KEY& x) const
{
return find(x, root);
}
template <class KEY, class OTHER>
SET<KEY, OTHER>* binarySearchTree<KEY, OTHER>::find(const KEY& x, BinaryNode* t) const
{
if (t == NULL || t->data.key == x) {
return t;
}
if (x < t->data.key) {
return find(x, t->left);
} else {
return find(x, t->right);
}
}
template <class KEY, class OTHER>
void binarySearchTree<KEY, OTHER>::insert(const SET<KEY, OTHER>& x)
{
insert(x, root);
}
template <class KEY, class OTHER>
void binarySearchTree<KEY, OTHER>::insert(const SET<KEY, OTHER>& x, BinaryNode*& t)
{
if (t == NULL) {
t = new BinaryNode(x);
} else if (x.key < t->data.key) {
insert(x, t->left);
} else if (x.key > t->data.key) {
insert(x, t->right);
}
}
template <class KEY, class OTHER>
void binarySearchTree<KEY, OTHER>::remove(const KEY& x)
{
remove(x, root);
}
template <class KEY, class OTHER>
void binarySearchTree<KEY, OTHER>::remove(const KEY& x, BinaryNode*& t)
{
if (t == NULL) {
return;
}
if (x < t->data.key) {
remove(x, t->left);
}
else if (x > t->data.key) {
remove(x, t->right);
}
else if (t->left != NULL && t->right != NULL) {// Two children
BinaryNode* tmp = t->right;
while (tmp->left != NULL) {
tmp = tmp->left;
}// Find the smallest node in the right subtree
t->data = tmp->data;
remove(t->data.key, t->right);// Remove the smallest node in the right subtree
}
else {// One or zero children
BinaryNode* oldNode = t;
t = (t->left != NULL) ? t->left : t->right;
delete oldNode;
}
}
template <class KEY, class OTHER>
void binarySearchTree<KEY, OTHER>::makeEmpty(BinaryNode*& t)
{
if (t != NULL) {
makeEmpty(t->left);
makeEmpty(t->right);
delete t;
}
t = NULL;
}
int main()
{
SET<int, char*> a[] = { {10,"aaa"},{8,"bbb"},{21,"ccc"},{87,"ddd"},{56,"eee"},{4,"fff"},{11,"ggg"},{3,"hhh"},{22,"iii"},{7,"jjj"} };
binarySearchTree<int, char*> tree;
SET<int, char*>* p;
SET<int, char*> x;
for (int i = 0; i < 10; i++) {
tree.insert(a[i]);
}
p = tree.find(21);
if (p) {
cout << "Find 21: " << p->other << endl;
} else {
cout << "21 not found" << endl;
}
tree.remove(21);
p = tree.find(21);
if (p) {
cout << "Find 21: " << p->other << endl;
} else {
cout << "21 not found" << endl;
}
return 0;
}
AVL 树¶
AVL 树(二叉平衡树)的定义¶
-
二叉平衡树是满足某个平衡条件的二叉查找树,其保证树的高度是 \(O(\log N)\),从而操作都是 \(O(\log N)\)
-
最理想是每个节点的左右子树都有同样的高度,不过条件可以放宽一些,因此有了二叉平衡查找树
-
平衡因子(平衡度):结点的平衡度是结点的左子树的高度减去右子树的高度
-
要求每个结点的平衡因子都为 \(+1, -1, 0\),即每个结点的左右子树的高度最多差 \(1\)
-
一棵由 \(N\) 个结点组成的 AVL 树的高度 \(H \leq 1.44\log (N+1) - 0.328\)
-
AVL 树的实现¶
-
采用二叉链表存储
-
每个结点包含以下字段
-
数据
-
键值-数据对
-
节点高度
-
-
左、右子结点指针
-
-
-
运算实现
-
查找:与二叉查找树相同
-
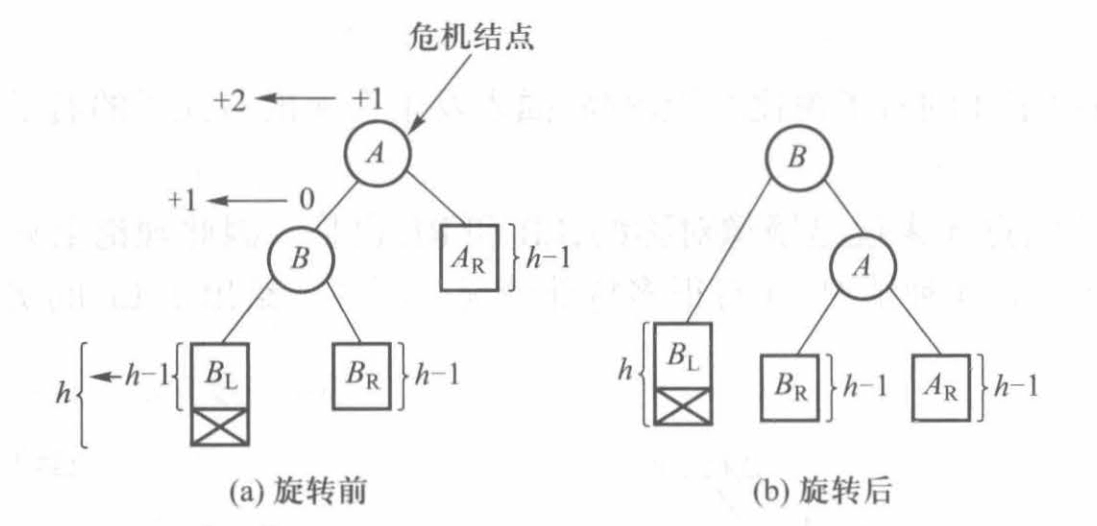
插入:插入结点后检查到根结点路径上的平衡性,如果没破坏平衡性,可以直接插入,然后自下而上修改结点平衡度(若有结点平衡度没变,上面的就都不用修改);如果破坏了平衡性,则需要调整树的结构(单旋转 or 双旋转),再修改平衡度
-
插入方法:LL 和 RR、LR 和 RL 是对称的
-
LL/RR:插入在危机结点的左子结点的左子树/右子结点的右子树,进行单旋转
-
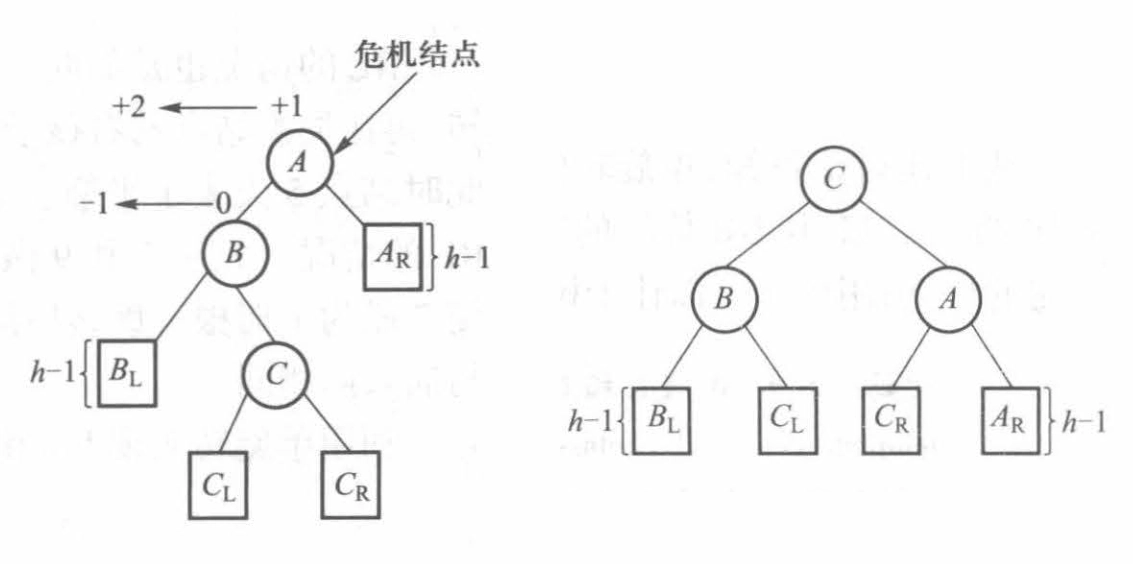
LR/RL:插入在危机结点的左子结点的右子树/右子结点的左子树,进行双旋转
-
LR:先对危机结点的左子树执行 RR,再对危机结点自身执行 LL
-
RL:先对危机结点的右子树执行 LL,再对危机结点自身执行 RR
-
-
-
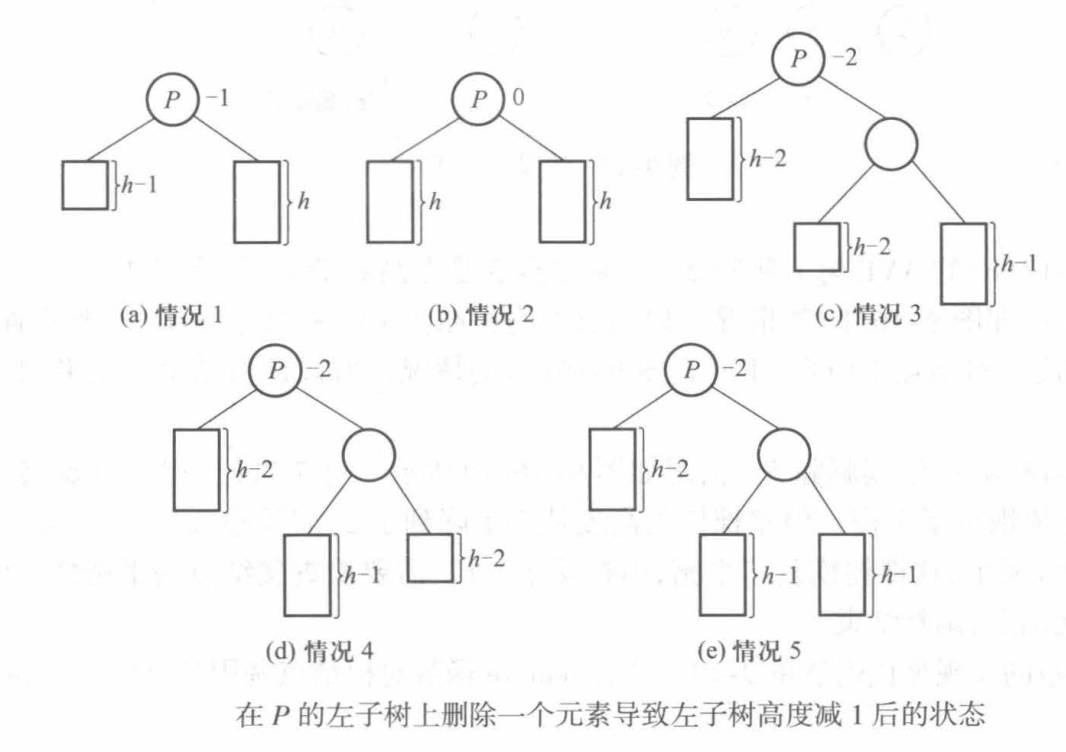
删除:删除结点后检查到根结点路径上的平衡性,共分五种情况:
-
#include "9-1-dynamicSearchTable.h"
#include <bits/stdc++.h>
using namespace std;
template <class KEY, class OTHER>
class AvlTree : public dynamicSearchTable<KEY, OTHER>
{
public:
AvlTree();
~AvlTree();
SET<KEY, OTHER>* find(const KEY& x) const;
void insert(const SET<KEY, OTHER>& x);
void remove(const KEY& x);
private:
struct AvlNode {
SET<KEY, OTHER> data;
AvlNode* left;
AvlNode* right;
int height;
AvlNode(const SET<KEY, OTHER>& thedata, AvlNode* l=NULL, AvlNode* r=NULL, int h=0)
: data(thedata), left(l), right(r), height(h) {}
};
AvlNode* root;
void insert(const SET<KEY, OTHER>& x, AvlNode*& t);
bool remove(const KEY& x, AvlNode*& t);
void makeEmpty(AvlNode*& t);
void LL(AvlNode*& t);
void LR(AvlNode*& t);
void RL(AvlNode*& t);
void RR(AvlNode*& t);
int height(AvlNode* t) const { return t == NULL ? -1 : t->height; }
int max(int a, int b) { return a > b ? a : b; }
bool adjust(AvlNode*& t, int subTree);
};
template <class KEY, class OTHER>
AvlTree<KEY, OTHER>::AvlTree()
{
root = NULL;
}
template <class KEY, class OTHER>
AvlTree<KEY, OTHER>::~AvlTree()
{
makeEmpty(root);
}
template <class KEY, class OTHER>
SET<KEY, OTHER>* AvlTree<KEY, OTHER>::find(const KEY& x) const
{
AvlNode* t = root;
while (t != NULL && t->data.key != x) {
if (x < t->data.key) {
t = t->left;
} else {
t = t->right;
}
}
return t == NULL ? NULL : (SET<KEY, OTHER>*)t;
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::insert(const SET<KEY, OTHER>& x)
{
insert(x, root);
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::insert(const SET<KEY, OTHER>& x, AvlNode*& t)
{
if (t == NULL) {
t = new AvlNode(x, NULL, NULL);
} else if (x.key < t->data.key) {
insert(x, t->left);
if (!adjust(t, 1)) {
if (height(t->left) - height(t->right) == 2) {
if (x.key < t->left->data.key) {
LL(t);
} else {
LR(t);
}
}
}
} else if (x.key > t->data.key) {
insert(x, t->right);
if (!adjust(t, 0)) {
if (height(t->right) - height(t->left) == 2) {
if (x.key > t->right->data.key) {
RR(t);
} else {
RL(t);
}
}
}
}
t->height = max(height(t->left), height(t->right)) + 1;
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::remove(const KEY& x)
{
remove(x, root);
}
template <class KEY, class OTHER>
bool AvlTree<KEY, OTHER>::remove(const KEY& x, AvlNode*& t)
{
if (t == NULL)
{
return true;
}
if (x == t->data.key)
{
if (t->left == NULL || t->right == NULL)
{
AvlNode* oldNode = t;
t = (t->left != NULL) ? t->left : t->right;
delete oldNode;
return false;
}
else
{
AvlNode* tmp = t->right;
while (tmp->left != NULL)
{
tmp = tmp->left;
}
t->data = tmp->data;
if (remove(tmp->data.key, t->right))
{
return true;
}
else return adjust(t, 1);
}
}
if (x < t->data.key)
{
if (remove(x, t->left))
{
return true;
}
else return adjust(t, 0);
}
else
{
if (remove(x, t->right))
{
return true;
}
else return adjust(t, 1);
}
}
template <class KEY, class OTHER>
bool AvlTree<KEY, OTHER>::adjust(AvlNode*& t, int subTree)
{
if (subTree)
{
if (height(t->left) - height(t->right) == 1)
{
return true;
}
if (height(t->right) == height(t->left))
{
--t->height;
return false;
}
if (height(t->left->right) > height(t->left->left))
{
LR(t);
return false;
}
LL(t);
if (height(t->right) == height(t->left))
{
return false;
}
else return true;
}
else
{
if (height(t->right) - height(t->left) == 1)
{
return true;
}
if (height(t->right) == height(t->left))
{
--t->height;
return false;
}
if (height(t->right->left) > height(t->right->right))
{
RL(t);
return false;
}
RR(t);
if (height(t->right) == height(t->left))
{
return false;
}
else return true;
}
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::makeEmpty(AvlNode*& t)
{
if (t == NULL) {
return;
}
makeEmpty(t->left);
makeEmpty(t->right);
delete t;
t = NULL;
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::LL(AvlNode*& t)
{
AvlNode* l = t->left;
t->left = l->right;
l->right = t;
t->height = max(height(t->left), height(t->right)) + 1;
l->height = max(height(l->left), t->height) + 1;
t = l;
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::LR(AvlNode*& t)
{
RR(t->left);
LL(t);
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::RL(AvlNode*& t)
{
LL(t->right);
RR(t);
}
template <class KEY, class OTHER>
void AvlTree<KEY, OTHER>::RR(AvlNode*& t)
{
AvlNode* r = t->right;
t->right = r->left;
r->left = t;
t->height = max(height(t->left), height(t->right)) + 1;
r->height = max(height(r->right), t->height) + 1;
t = r;
}
散列表¶
散列表的定义¶
-
散列表的思想是用一个比集合规模略大的数组来存储这个集合,将数据元素关键字映射到这个数组的下标
-
这个映射成为 散列函数
-
散列函数的定义域范围大于值域,可能发生冲突/碰撞
-
散列函数¶
-
直接定址法:去关键字值或其线性函数值作为散列地址
-
除留余数法:如果 \(M\) 是散列表的大小,关键字为 \(x\),则散列地址为 \(H(x) = x \mod M\),常选 \(M\) 为素数,使其分布更均匀
-
数字分析法:对关键字集合中的所有关键字,分析每一位上数字分布,取关键字的某一部分(数字分布均匀的位)进行映射
-
平方取中法:如果关键字中各位的分布都比较均匀,但关键字的值域比数组规模大,则可以将关键字平方后,取其结果的中间各位作为散列函数值
-
折叠法:关键字相当长,以至于和散列表的单元总数相比大得多时,可选取一个长度后,将关键字按此长度分组相加
闭散列表¶
将溢出数据元素存放到没有使用过的单元中
-
线性探测法:
-
插入:当散列发生冲突时,探测下一个单元,直到发现一个空单元,即 \(H, H+1, H+2, H+3, \cdots\)
-
查找:算出来位置之后,找不到的话就向后查找,直到找到或者遇到空单元
-
删除:采用迟删除,标记该单元活动/被删除
-
缺点:可能产生 初始聚集
-
#include "9-1-dynamicSearchTable.h"
#include <bits/stdc++.h>
using namespace std;
template <class KEY, class OTHER>
class closeHashTable : public dynamicSearchTable<KEY, OTHER>
{
private:
struct node {
SET<KEY, OTHER> data;
int state; // 0: empty, 1: active, 2: deleted
node() { state = 0; }
};
node* array;
int size;
int (*key)(const KEY& x);
static int defaultKey(const int& k) { return k; }
public:
closeHashTable(int length = 101, int (*f)(const KEY& x) = defaultKey);
~closeHashTable() { delete [] array; }
SET<KEY, OTHER>* find(const KEY& x) const;
void insert(const SET<KEY, OTHER>& x);
void remove(const KEY& x);
};
template <class KEY, class OTHER>
closeHashTable<KEY, OTHER>::closeHashTable(int length, int (*f)(const KEY& x))
{
size = length;
array = new node[size];
key = f;
}
template <class KEY, class OTHER>
void closeHashTable<KEY, OTHER>::insert(const SET<KEY, OTHER>& x)
{
int initPos = key(x.key) % size;
int pos = initPos;
do {
if (array[pos].state != 1)
{
array[pos].state = 1;
array[pos].data = x;
return;
}
pos = (pos + 1) % size;
} while (pos != initPos);
}
template <class KEY, class OTHER>
void closeHashTable<KEY, OTHER>::remove(const KEY& x)
{
int initPos = key(x) % size;
int pos = initPos;
do {
if (array[pos].state == 0) return;
if (array[pos].state == 1 && array[pos].data.key == x)
{
array[pos].state = 2;
return;
}
pos = (pos + 1) % size;
} while (pos != initPos);
}
template <class KEY, class OTHER>
SET<KEY, OTHER>* closeHashTable<KEY, OTHER>::find(const KEY& x) const
{
int initPos = key(x) % size;
int pos = initPos;
do {
if (array[pos].state == 0) return NULL;
if (array[pos].state == 1 && array[pos].data.key == x) return (SET<KEY, OTHER>*)&array[pos];
pos = (pos + 1) % size;
} while (pos != initPos);
return NULL;
}
-
二次探测法:
-
当散列发生冲突时,检查远离初始探测点的某一单元,即 \(H, H+1^2, H+2^2, H+3^2, \cdots\)
-
定理:使用二次探测法且表的大小是一个素数,则如果表至少有一半空单元,新的元素总能被插入,且插入过程中没有一个单元被探测两次
-
动态扩展:当负载因子超过 \(0.5\) 时,需要把数组扩大一倍,并且进行 重新散列(新的数组隐含新的散列函数)
-
-
再散列法:
- 两个散列函数 \(H_1, H_2\),分别用于计算探测序列的起始地址和下一个探测的步长,即 \(H_1(x), H_1(x)+H_2(x), H_1(x)+2H_2(x), H_1(x)+3H_2(x), \cdots\)
开散列表/拉链表¶
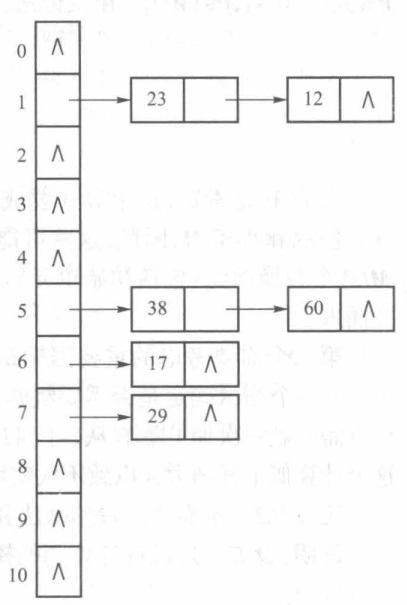
将具有相同散列地址的碰撞结点存储在一个单链表中,散列表中的 \(k\) 号单元保存的是指向散列地址同为 \(k\) 的链表的第一个结点的地址。
#include "9-1-dynamicSearchTable.h"
#include <bits/stdc++.h>
using namespace std;
template <class KEY, class OTHER>
class openHashTable : public dynamicSearchTable<KEY, OTHER>
{
private:
struct node
{
SET<KEY, OTHER> data;
node *next;
node(const SET<KEY, OTHER> &d, node *n = NULL)
{
data = d;
next = n;
}
node()
{
next = NULL;
}
};
node **array;//指针数组
int size;
int (*key)(const KEY &x);//函数指针
static int defaultKey(const int &x)
{
return x;
}
public:
openHashTable(int length = 101, int (*f)(const KEY &x) = defaultKey);
~openHashTable();
SET<KEY, OTHER> *find(const KEY &x) const;
void insert(const SET<KEY, OTHER> &x);
void remove(const KEY &x);
};
template <class KEY, class OTHER>
openHashTable<KEY, OTHER>::openHashTable(int length, int (*f)(const KEY &x))
{
size = length;
array = new node*[size];
key = f;
for (int i = 0; i < size; i++) array[i] = NULL;
}
template <class KEY, class OTHER>
openHashTable<KEY, OTHER>::~openHashTable()
{
node *p, *q;
for (int i = 0; i < size; i++)
{
p = array[i];
while (p != NULL)
{
q = p->next;
delete p;
p = q;
}
}
delete []array;
}
template <class KEY, class OTHER>
SET<KEY, OTHER> *openHashTable<KEY, OTHER>::find(const KEY &x) const
{
int pos;
node *p;
pos = key(x) % size;
p = array[pos];
while (p != NULL && p->data.key != x) p = p->next;
if (p == NULL) return NULL;
else return (SET<KEY, OTHER> *)p;
}
template <class KEY, class OTHER>
void openHashTable<KEY, OTHER>::insert(const SET<KEY, OTHER> &x)
{
int pos;
node *p;
pos = key(x.key) % size;
p = array[pos];
array[pos] = new node(x, array[pos]);
}
template <class KEY, class OTHER>
void openHashTable<KEY, OTHER>::remove(const KEY &x)
{
int pos;
node *p, *q;
pos = key(x) % size;
if (array[pos] == NULL) return;
p = array[pos];
if (array[pos]->data.key == x)
{
array[pos] = p->next;
delete p;
return;
}
while (p->next != NULL && p->next->data.key != x) p = p->next;
if (p->next != NULL)
{
q = p->next;
p->next = q->next;
delete q;
}
}